皮帶輸送機故障顯示智能控制器的設計

摘要:皮帶運輸機在運行過程中,由于負載、皮帶自身所受張力的不同,經常會發生打滑、跑偏、過載、撕裂等故障。本文旨在研究這些故障產生的原因,并通過智能控制器顯示發生的故障,做到故障定位準確。本系統通過一些傳感器對故障進行檢測,將信號傳入單片機,不同故障編碼顯示,通過數碼管顯示可以快速知道故障位置。系統以單片機為核心,通過外部信號和軟件設計,大大提高系統穩定性。
本文引用地址:http://www.czjhyjcfj.com/article/201610/306615.htm皮帶運輸機是一種摩擦驅動以連續方式運輸物料的機械,可以將物料在一定的輸送線上,從最初的供料點到最終的卸料點間形成一種物料的輸送流程。皮帶運輸機如今被廣
泛的用在碼頭、煤礦和工業配料等方面,皮帶運輸機的安全高效運行直接影響著生產的效率。對于多條皮帶運輸機組成的長距離運輸系統,其中一條發生故障如不能及時預報排除,將會對整個生產線造成影響。
1 皮帶運輸機故障分析
由于海綿墊在生產中需要進行烘干的處理,而剛生產出來的海綿墊由于自身水分過大,不能承受過大的張力,否則會拉斷,所以在工業生產中選擇皮帶作為傳動過程的載體。皮帶在運行過程中容易發生打滑、過負荷和斷帶等故障,這些故障都可以通過對皮帶速度的檢測進行判斷。
皮帶打滑主要是由于皮帶與傳動輥之間摩擦減少,一方面可能是皮帶沒有張緊,另一方面可能皮帶老化造成抓地效果差,直接的表現就是皮帶速度低于設定的速度。
過負荷故障產生的原因主要是皮帶張的太緊或者運輸的物品超過了額定承載量。該故障可能導致皮帶傳動驅動器報警而停止運轉,直接的表現就是速度小于設定值。其監控的方式可以通過監控驅動器的電流判斷。
斷帶產生的原因可能是皮帶老化,或者聯軸器機械故障斷開。當故障發生時,皮帶速度會急劇下降,瞬間可停止運行。
2 皮帶故障如何檢測
2.1 皮帶打滑
皮帶打滑時直接影響就是主傳動速度與設定速度不一致,假設主轉動速度為Vp,設定速度為Vs,打滑時速度偏差在一定范圍內我們忽略影響,假設極限為10%就需要進行檢
修,那么故障判斷為
,在此過程中,在皮帶上設置一根被動輥,用接近開關探測被動輥單位時間里旋轉的圈數,乘上被動輥的周長就可以算出皮帶的運行速度了。接近開關的安裝如圖1所示。
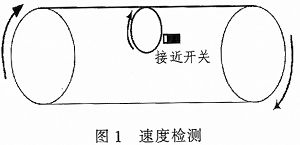
假設T秒內測得的接近開關脈沖數為n,被動輥的周長為C,那么
,Vs可以根據設定給驅動器的電壓得到,假設電壓為E,電壓與速度系數為K,那么Vs=K*E,這樣就可以通過這些參數判斷皮帶是否打滑了。
2.2 皮帶跑偏
跑偏的檢測采用對射光電管,安裝方式如圖2所示。
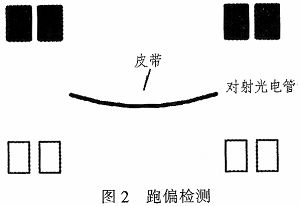
通過檢測對射光電管的開斷可以判斷皮帶是否跑偏,并觸發報警系統進行聲光報警,防止出現嚴重機器故障。內側為一級跑偏檢測,外側為二級跑偏檢測。
2.3 過負荷檢測
在工業生產中,為了更好的滿足生產需求,一般采用變頻器驅動電機進行調速,當負載增加時,變頻器的電流也會增加。我們通過設置變頻器的電流來保護電機,使其工作在安全狀態下。當電機電流超出設定的電流門限時,輸出報警,并驅動外部聲光報警器。
2.4 皮帶斷裂和聯軸器脫輥檢測
當皮帶或者聯軸器脫輥時,第一影響的就是皮帶的速度,檢測皮帶的速度迅速下降,幾秒內可能就變為0。在這些故障的檢測中,最多關注的就是皮帶速度的檢測,通過一些故障對速度的影響,運用反推的方法,基本可以實現故障的全監控。
3 智能控制器硬件電路設計
本系統以單片機STC90C516為核心,外圍主要由接近開關、對射光電管、變頻器、LED顯示器、D/A轉換模塊PCF8951T和一些輔助電路組成。下圖3給出了硬件的原理圖。
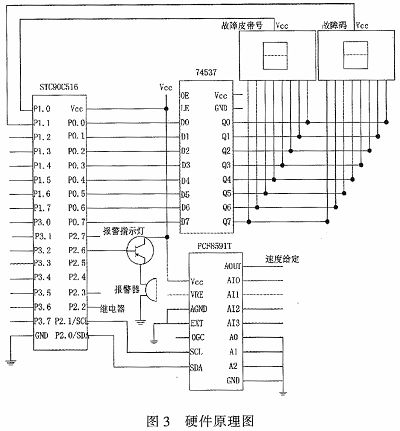
通過將外部的電機啟動信號輸入P1.2口,停止信號接P1.3口,P2.2口接啟動繼電器,實現當檢測到P1.2按鍵被按下時,繼電器吸合,電機啟動;當檢測到P1.3口按鍵被按下時,繼電器斷開,電機停止運轉。系統采用2個8段碼LED顯示,一個顯示故障皮帶的皮帶號碼,另一個顯示故障代碼。
預設故障代碼為:0—正常;1—打滑;2—斷裂或聯軸器未連接;3—皮帶跑偏。如果有故障發生,P2.6將驅動蜂鳴器進行報警,同時P2.7將使指示燈閃爍達到聲光報警的效果。系統采用PCF8951T的A/D轉換芯片,直接通過SCL、SDC的I2C總線,將AOUT的輸出模擬量作為傳動輥的速度信號,并通過P1.5和P1.6實現加減速。
將被動輥的速度探頭檢測信號接入P1.4,通過對單位時間內測得的脈沖數,得到皮帶運行的速度,與給定的速度信號進行對比,可以分析皮帶是否正常運行。一根皮帶采用4對對射光電管,分兩組對皮帶是否跑偏進行檢測,一級跑偏時進行預警,二級跑偏時將停止皮帶的輸送,以防止不必要的財產損失。
4 軟件設計
本系統采用C語言進行編程,由主程序和各個子程序組成。智能控制器的程序流程圖如圖4所示。
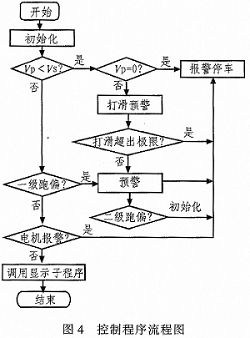
程序初始化后,依次檢查皮帶是否打滑、跑偏、電機是否過載報警等故障,并根據故障的等級進行相應的處理。LED顯示故障代碼采用調用子程序的方式。編程軟件采用Keil進行設計,并對相應的程序進行模塊化處理。
5 結束語
主要針對現今國內主流的海綿生產線容易發生的故障進行分析研究,設計了集報警、顯示、操作于一體的自動化系統。該系統主要以單片機為核心,充分利用了單片機集成度高、功能強、體積小、功耗低和可靠性高等特點。在試驗中,誤差較小,基本可以滿足使用的要求。












評論