基于ARM單片機的自動測高測距小車的研究與設計

摘要:生活中許多目標的高度和水平距離需要進行測量。目前主要的測量方法,仍以傳統的皮尺丈量為主,測量效率不高,有時還很不方便,沒有技術成熟的數字式測高測距產品。以基本的數學方法為理論依據,利用遙控小車做為載體,采用角度傳感器測量角度、霍爾傳感器測量水平距離等,通過單片機LM3S615進行數據計算,實現了對待測目標物體的高度、水平距離等數據的快速、精確和數字式的測量,高度測量精度可達99.06%,水平測量精度則可迭98.06%。
關鍵詞:測高;測距;LM3S615;角度傳感器;霍爾傳感器;LCD液晶顯示
目前,國內外對于測高、測距的研究主要集中在基于對衛星、雷達等信號進行的處理,其應用范圍主要集中在軍事、海洋或地質等數據的測量及勘測。應用于解決日常生活的研究則很少,比如測量難于用傳統方法測量的定目標高度、水平距離等。即使有研究也主要是采用機械方法或對傳統方法進行改進或修繕。目前發達的電子信息科學技術,給這些日常生活中的高度和距離測量,提供了新的思路和解決方案。本設計將利用遙控小車做為測量工具,分別采用角度傳感器、霍爾傳感器等傳感器來獲得測量物理數據并通過單片機進行數據處理及計算,從而實現對待測目標物體的高度、水平距離等數據的快速、精確和數字式的測量。
1 理論分析與計算
1.1 設計原理分析及計算
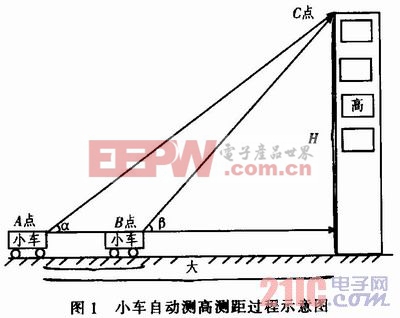
小車自動測高測距的過程及相關參數如圖1所示。當小車停放在A點時,遙控小車的裝置調整角度,使測量光點定點到C點,測量并存儲此時的角度α;之后,遙控控制小車前進,使小車沿直線行進到達B點,并再次調整測量裝置,使測量光點再次定點到C點,并測量記錄此時的角度β。并對從A到B的行進距離L進行測量和記錄。利用以上數據,就可以計算出待測目標的高度H及小車距離待測目標的距離S,計算式如下式(1)所示。
![]()
1.2 系統設計思想
從測量過程看,需要進行測量的數據有角度α、角度β和小車行進距離L。通過對器件的反復比較,在本設計中,采用安裝在舵機上的激光光源作為定點C點的裝置;采用角度傳感器來進行角度的測量;采用霍爾傳感器作為距離測量的傳感器;采用單片機作為主要控制單元,來控制小車直線行進、舵機轉動定點、角度及距離數據的獲取和計算及測量數據的LCD顯示等。











評論