基于AT89C52單片機的智能環保小車電路模塊設計

隨著電子產品的快速發展,“智能工具”越來越普及化。智能清潔工具也為人們的生活帶來了很大的便利。傳統的清潔工具功能相對比較單一,只能吸塵,或只能拖地,且基本是手動的,使用起來比較費力。本文設計的多功能智能環保小車可分為以下幾個部分:無線遙感模塊、避障模塊、尋光模塊、紅外對射模塊、穩壓模塊、降壓模塊、電機驅動模塊。它可實現灑水、拖地、風干、自動避障等多種功能,并且比較節能。
本文引用地址:http://www.czjhyjcfj.com/article/201710/369492.htm電機驅動模塊
采用步進電機控制懸掛物體的準確運動,步進電機不需要使用傳感器就能精確定位,但其驅動能有限,故不適合驅動小車。因此,可采用低內阻大電流的四直流電機,其速度相應較好,可以為小車的行走及其他功能更好地提供動力。利用四直流電機模塊驅動小車可以實現對小車轉向、直行和倒車的控制。圖2 所示為四直流電機驅動模塊原理圖。

圖2 四直流電機驅動原理圖
避障模塊電路設計
小車車頭處裝有三個紅外傳感器,小車在行進時紅外傳感器發射出紅外線,紅外線遇到前方的障礙物時會發生漫反射,反射信號被紅外傳感器接收到以后再傳遞給單片機,從而通過單片機控制小車做出相應的反應。三只紅外傳感器分別置于小車前端,不僅方向與小車的前進方向平行,而且對小車與障礙物的相對距離和方位能作出較為準確的判斷。圖3所示為紅外避障模塊的原理圖。
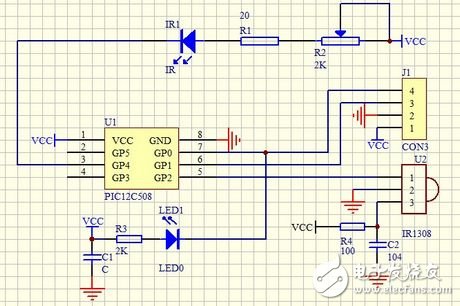
圖3 紅外避障模塊原理圖
紅外對射模塊
本紅外對射模塊主要由電壓比較器LM393和對射式紅外頭組成,工作電壓為5V。該模塊用于檢測升降裝置的狀態[4]。該模塊對裝置的靈活度要求較低,用于本智能小車更有利于程序控制[5-6]。圖4所示為紅外對射模塊原理圖。
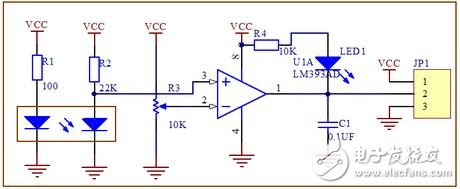
圖4 紅外對射模塊
本設計采用AT89C52單片機作為控制核心系統,設計了一種避障、灑水、拖地、風干為一體的智能環保清潔小車。小車包含了清潔地面系統、供水系統和升降裝置等,小車中的水泵實現了灑水功能,車底安裝了升降海綿,車尾安裝了鼓風機以實現拖地風干功能。小車可在遙控模式、自動模式、自動尋光充電三種模式下工作,實現了多功能控制,并給出了硬件電路設計流程。經過實際測試,能夠實現所有功能,且性能穩定。小車可以在遙控、自動、自動尋光充電三種模式下工作,從而體現了它的智能化。與傳統清潔小車相比,其功能更完善,且使用起來更方便。經過實際測試,小車實現了所有預期的功能,且能達到預定目標。












評論