基于單片機STC12C52系列直流電機調速系統

摘要:介紹了基于單片機的直流電機的調速控制系統。該系統選用宏晶科技公司的高速/低功耗/超強抗干擾的新一代單片機STC12C5206AD芯片作為主要部分,輔以上位機、電機驅動系統等設備對直流電動機進行不同速度的控制。
本文引用地址:http://www.czjhyjcfj.com/article/201610/306588.htm在現代工業中,電機調速系統被廣泛應用于機械、冶金、石油化學、國防工業等工業部門中。隨著計算機進入控制領域,以及新型的電力電子功率元器件的不斷出現,使用脈寬調制(pulse width modulation,簡稱PWM)控制方式已成為絕對主流。脈寬調制是一種使用程序來控制波形占空比、周期、相位波形的技術,在電機驅動、D/A轉換等場合有廣泛的應用。這種控制方式已作為直流電動機數字控制的基礎。在直流調速控制中,可以采用各種控制器,單片機是其中一種選擇。
1 功能描述
電機調速系統采用微處理器作為控制核心,以控制板卡、電機驅動芯片及外圍電路、電機等構成整個電機調速系統。由微處理器產生1對(共2路)PWM信號,該PWM信號經電機驅動芯片控制執行電機,實現電機在不同運行狀態下的調速要求。
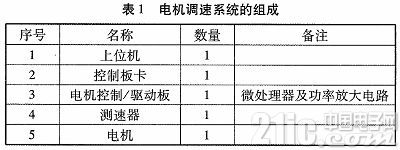
2 電機調速系統的組成
電機調速系統的組成見表1。
3 技術指標
技術指標如下:
1)工作溫度:-40℃~+60℃;
2)供電電壓:DC 27 V;
3)輸出扭矩:1.2 N·M;
4)最大空載轉速:1 050 rpm;
5)額定電流:2.3 A。
4 設計原理
4.1 原理框圖
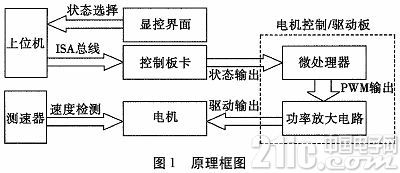
原理框圖見圖1。
4.2 原理介紹
如圖1所示,通過對計算機屏幕顯示界面的操作,選取電機不同的運轉狀態,由計算機控制板卡采集相應的狀態信息,輸出相應的狀態量代碼(狀態量指示見真值表 2)并送入到單片機,單片機根據接收的代碼信息,產生相應占空比的PWM脈寬信號,該脈寬信號經功率放大電路放大后驅動執行電機,從而實現對電機的調速控制。
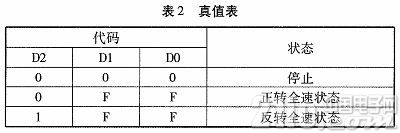
其中高位D2表示方向性,0為正方向,1為反方向;D1,D0表示速度大小。
5 設計分析
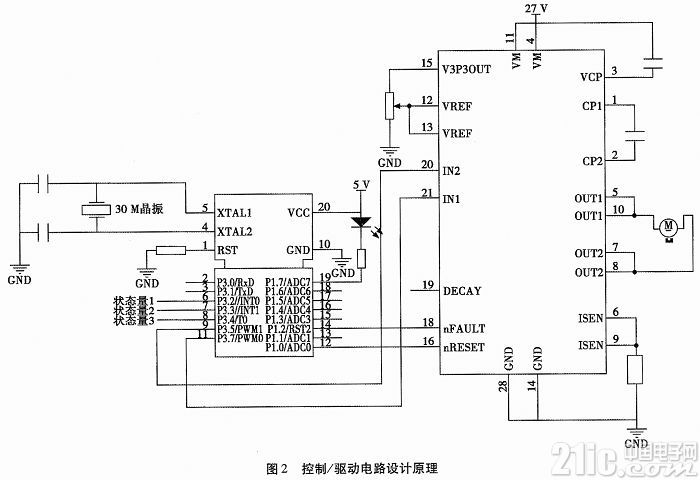
5.1 控制/驅動電路設計
控制/驅動電路主要由單片機STC12C5206AD、電機驅動芯片DRV8842等組成。控制/驅動電路設計原理見圖2。
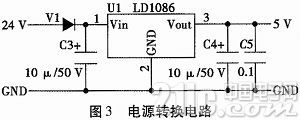
5.2 電源電路
本調速系統工作電源為直流+24 V、直流+5 V。其中+5 V由直流+24 V轉換輸出,供單片機STC12C5202AD使用。+5 V轉換電路主要由穩壓器LD1086、電容器等組成,詳見圖3。在設計電路板時,要盡量加寬電源線,同時將電源線和信號線分離,以免產生干擾信號。
5.3 電機驅動電路
電機驅動電路主要由驅動芯片DRV8842及其外圍電路組成。
驅動芯片DRV8842是專用于電機的集成電路,內部包含一個PWM電流控制的H橋控制電路,電路見圖4。工作電壓為8.2 V~45 V,工作電流為5 A,工作溫度為-40℃~85℃。
如圖4,通過控制DRV8842的IN1和IN2引腳輸入狀態,能直接控制OUT1和OUT2的輸出狀態,邏輯控制見表3。
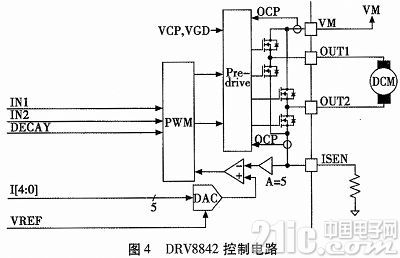
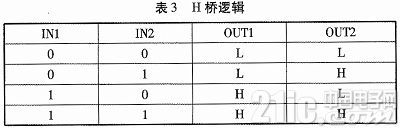
采用PWM脈寬調制控制電機速度,其控制邏輯如下:當IN1輸入PWM信號,IN2輸入低電平時,電機正轉;當IN1輸入低電平,IN2輸入PWM信號時,電機反轉;PWM信號的占空比決定電機的轉速。
5.4 微處理器
微處理器采用深圳宏晶科技生產的STC12C5206AD。STC12C5206AD是宏晶科技生產的單時鐘/機器周期(1T)的單片機,是高速/低功耗/超強抗干擾的新一代單片機,指令代碼兼容傳統8051,但速度快8倍~12倍。內部集成MAX810專用復位電路,2路PWM,8路高速8位A/D轉換 (300 k/s即30萬次/秒),針對電機控制,強干擾場合。
主要性能如下:
1)工作電壓:5.5 V~3.3 V;
2)工作頻率:0~35 MHz,相當于普通8051的0~420 MHz;
3)用戶應用程序空間:6 k字節;
4)片上集成RAM:256字節;
5)通用I/O口:13個;
6)有EEPROM功能;
7)看門狗;
8)內部集成MAX810專用復位電路(外部晶體20 M以下時,復位腳直接1 k電阻到地);
9)PWM:2路;
10)A/D轉換:8位精度ADC,共8路,轉換速度可達300 k/s(每秒鐘30萬次);
11)工作溫度:-40℃~85℃。
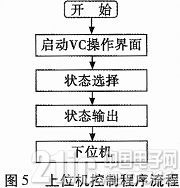
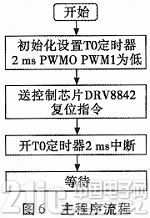
5.5 軟件分析
軟件主要由上位機控制程序和下位機控制程序兩部分組成。軟件流程圖見圖5、圖6。
6 結束語
設計結果滿足要求,運行狀態良好,達到預期目的。












評論