手術動力裝置微電機的測功機的研究

摘要:手術動力裝置是臨床的重要器械,它的電機的性能直接關系到病患的生命,所以對手術動力裝置微電機的測功機的研究就顯得尤為重要。基于windows平臺,以STC單片機為數據采集系統,配合必要的傳感器和驅動電路及信號調理電路,應用模糊控制PID算法,開發手術動力裝置微型電機的測功機主控系統。該系統完成了數據采集、處理、顯示和報警等功能。
關鍵詞:測功機;單片機;模糊控制;手術動力裝置
隨著我國臨床醫學的發展,手術動力裝置成為臨床手術中重要的器械之一。一般要求手術動力裝置需具有尺寸小,轉矩脈動小,轉速精確可調等優點。手術動力裝置所選用電機與動力設備匹配之前,都需經過測功機進行動力測試,因手術動力裝置的微型電機要求轉速高而轉矩精確等特點,市場上沒有適合手術動力裝置微型電機的測功機,所以對手術動力裝置微型電機的測功機研究就顯得尤為重要。
手術動力裝置微電機的測功機由被測電機、加載器、多種傳感器、單片機、上位機及驅動電路等組成。其中,加載器是一臺他勵直流電機;被測電機與加載器用聯軸器相連;數據采集采用STC12C5A60S2單片機,它采集被測電機和加載器的信號,并傳遞給計算機,并接受計算機處理之后信號用以驅動被測電機和加載器;上位機應用程序完成啟動、停止整個系統、處理和傳遞參數給單片機,以及模糊控制PID算法的運行。模糊PID控制算法克服了模糊控制精度不高和存在靜態余差的缺點,達到良好的控制效果。
1 手術動力裝置微電機的測功機的硬件設計
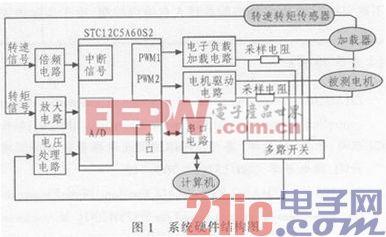
整個系統硬件結構如圖1所示,系統主要包括STC12C5A60S2單片機最小系統、電子負載加載電路、電機驅動電路、倍頻電路、放大電路、電壓處理電路和串口通信電路等。
1.1 電子負載加載電路
為了實現自動測試采用自動加載模塊,它主要給被測電機自動加負載,具體采用電樞外接電阻的自動調節模塊。此時勵磁磁場不變,改變電樞外接電阻來調節電樞電流,從而達到改變電機負載轉矩的目的。為了實現自動調節,負載使崩電子可調電阻,采用PWM控制。
1.2 轉矩轉速測量
轉矩測量采用定子轉矩法,即把電機的定子和轉子同時架空,電機旋轉時,電磁力對轉子產生一個旋轉的力矩,同時也向定子施加一個大小相等,且方向相反的反作用力矩。通過力傳感器測得定子的受力,就能計算出轉子所受到的力矩了。根據測試電機的力矩范圍,這里選取6 kg的力傳感器,并用集成運放AD620對其輸出信號進行放大。
轉速測量采用的是WTK-10凹槽型光電傳感器,傳感器的相關電路在內部,直接開關量輸出,檢測頻率為1 kHz,測速采用6縫隙測速碼盤。
1.3 無刷電機驅動電路
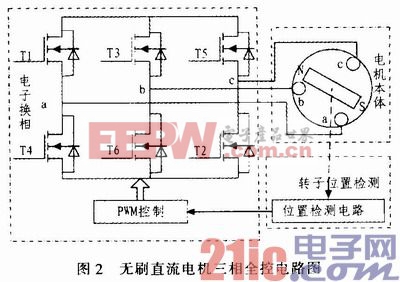
其中被測無刷直流電機型號是portescap生產的B0610-024A-R00電機,此電機轉子的材料為永磁磁鋼,電樞繞組放置在定子上。通過永磁磁場和電樞磁場之間的作用,從而產生連續的轉矩來保證電機的連續工作。其中永磁磁場由轉子磁鋼定子產生,電樞磁場由定子繞組產生。電機的電子換相部分采用繞組導通120°電角度、三相橋式控制方式,電機本體的定子采用星型連接方式的系統比較合適。電路圖如圖2所示。
1.4 其他電路
多路開關采用CD4051,電壓處理電路采用AD620運算放大器對信號進行處理。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
電子負載相關文章:電子負載原理










評論