Linux下ARM 和單片機的串口通信設計

摘要:介紹Linux環境下串口通信的設計方法和步驟,并介紹了ARM9微處理器s3c2440在Linux下和C8051Fxxx系列單片機進行串行通信的設計方法,給出了硬件連接和通信程序流程圖。該方法可靠、實用,適用于大多數LinuxARM和單片機串口通信的場合。
本文引用地址:http://www.czjhyjcfj.com/article/149051.htm0引言
數據采集系統中由于單片機側重于控制,數據處理能力較弱,對采集的數據進行運算處理比較繁瑣,如果通過串口與上位機通信,利用上位機強大的數據處理能力和友好的控制界面對數據進行處理和顯示則可以提高設計效率。串口通信以其簡單的硬件連接,成熟的通信協議,成為上下位機之間通信的首選。移植了Linux操作系統的s3c2440可以在Linux環境下操作串口,降低了串口操作的難度,可以使開發者集中精力開發大規模的應用程序,而不必在操作底層設計上耗費時間。
1硬件連接
s3c2440是三星公司生產的基于ARM9核的處理器,采用3.3V電壓供電;C8051Fxxx系列單片機是美國CYGNAL公司推出的與8051兼容的高性能高速單片機,采用3.3V電壓供電。兩者供電電壓相同,所以進行串行口通信時不需要進行電平轉換。硬件連接采用最常用的TXD,RXD,GND三線連接方式。注意采用交叉連接方式,即TXDRXD,RXDTXD.
2Linux下串口通信
2.1Linux下串口設備描述
s3c2440上移植了Linux2.6.32操作系統,加載了s3c2440的串口驅動程序,通過Linux提供的串口操作函數和文件操作函數把對串口的操作等同于文件操作,降低了串口的操作難度,提高了效率。在程序中設備和文件都是通過文件描述符來操作的,文件描述符在Linux內核中是一個非負整數。Linux設備文件都存放在/dev目錄下,串口也不例外,在/dev中可以找到串口對應的設備文件,本文對應的串口1的設備文件路徑是/dev/ttySAC1。
2.2Linux下串口通信程序設計
串口通信需要設置一些參數,如波特率、數據位、停止位,輸入輸出方式等。這些參數都存在于Linux提供的termios結構中,該結構是Linux系統用于查詢和操作各個終端的一個標準接口,定義在頭文件
STructtermios{
tcflag_tc_iflag;/*輸入標志*/
tcflag_tc_oflag;/*輸出標志*/
tcflag_tc_cflag/*控制標志*/
tcflag_tc_lflag/*本地標志*/
cc_tc_cc[NCCS];/*控制特性*/
};
Linux串口通信步驟可分為以下三步,操作流程如圖1所示。
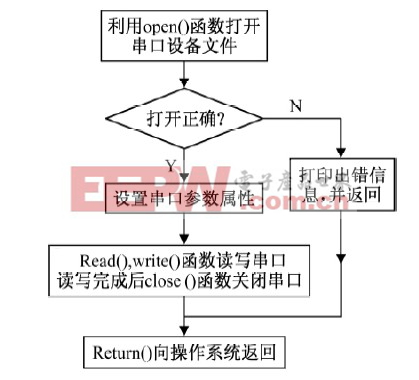
圖1操作流程
第一步:打開串口
調用open()函數打開串口設備文件,若出錯則返回-1,成功則返回文件句柄。
#defineUART1/dev/ttySAC1
intfd;
fd=open(UART1,O_RDWR)/*以可讀可寫方式打開串口設備*/
第二步:設置串口屬性
函數tcsetattr()可以設置串口的結構屬性,tcgetatt()可以得到串口的結構屬性。在termios結構中,最重要的是c_cflag,用戶通過對其進行賦值可以實現串口波特率、數據位、停止位、奇偶校驗位等參數的設置。c_cc數組中的兩個變量VMIN和VTIME判斷是否返回輸入,c_cc[VTIME]設定字節輸入時間計時器,c_cc[VMIN]設定滿足讀取功能的最低接收字節數。這兩個變量的值要設定合理,才能保證串口的通信成功率。
intset_attr(intfd)
{
structtermiosnewtio,oldtio;
tcgetattr(fd,oldtio);
cfsetispeed(newtio,B9600);/*設置讀波特率為9600*/
cfsetospeed(newtio,B9600);/*設置寫波特率為9600*/
memset(newtio,0
,sizeof(newtio))
;
newtio.c_cflag=CS8|CREAD;/*設置數據位為8位并且使能接收*/
newtio.c_cflag=~PARENB;/*不進行奇偶校驗*/
newtio.c_cflag=~CSTOPB;/*1位停止位*/
newtio.c_cc[VMIN]=1;/*當接收到一個字節數據就讀取*/
newtio.c_cc[VTIME]=0;/*不使用計時器*/
tcflush(fd,TCIOFLUSH);/*刷清輸入輸出緩沖區*/
tcsetattr(fd,TCSANOW,newtio)/*使設置的終端屬性立即生效*/
}
第三步:串口讀寫,串口關閉
設置完通信參數后,就可以用標準的文件讀寫命令read()和write()操作串口了。最后在退出之前,用close()函數關閉串口。
voidrd_wr()
{
write(fd,wbuf,10);
usleep(500000);/*延時50ms等待下位機發送數據*/
read(fd,rbuf,10);
printf(readstringis%sn,rbuf);
}
3通信程序設計
ARM與單片機的串口通信程序包括兩方面:一方面是作為上位機的ARM的串口通信程序,另一方面是作為下位機的單片機的串口通信程序。在通信之前必須制定合理的通信協議以保證通信的可靠性和成功率。現約定雙方通信協議如下:
(1)波特率為9600bit/s,幀格式為1-8-N-1(1位起始位,8位數據位,無奇偶校驗,1位停止位);(2)由于上位機ARM的速度遠遠高于下位機單片機的速度,所以采用上位機主動聯絡,下位機等待的方式。在數據傳送前ARM先發送聯絡信號/0xaa,單片機收到后回答一個/0xbb,表示可以發送,否則繼續聯絡;(3)單片機端可以有中斷和查詢方式收發串口數據。本文采用中斷方式;(4)ARM處理器s3c2440采用UART1和單片機通信,UART0則作為s3c2440終端控制臺。
3.1上位機ARM的通信程序設計
由于s3c2440移植了定制和裁剪后的Linux2.6.32內核的操作系統,對串口的操作采用上述的Linux下串口操作方法,程序流程圖如圖2所示。
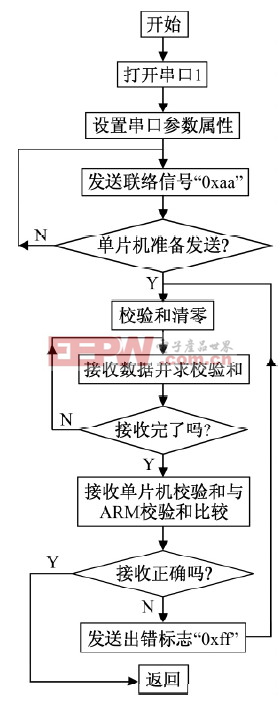
圖2程序流程圖
3.2下位機單片機的通信程序設計
選用C8051F021的定時器T1作為波特率發生器,晶振采用11.0592MHz,定時器工作在方式2,計數初值為0xfd,串口工作在串行方式1(1-8-N-1),采用中斷方式收發數據。程序流程圖如圖3所示。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)
linux相關文章:linux教程
數字通信相關文章:數字通信原理
通信相關文章:通信原理
負離子發生器相關文章:負離子發生器原理 晶振相關文章:晶振原理 離子色譜儀相關文章:離子色譜儀原理








評論