基于頭部位置特征的疲勞駕駛檢測儀

針對目前嚴重的疲勞駕駛行為,研制了一種疲勞駕駛檢測裝置。在座椅頭枕上前方正對駕駛員頭部的位置安裝1個紅外線發(fā)射二極管和2個紅外線接收頭,由單片機控制紅外線發(fā)射的電流強度,同時檢測接收頭的信息就可以檢測頭部的相對位置。如果駕駛員處在疲勞駕駛狀態(tài)中,頭部必定偏離正常位置并且時間超過設定值,則輸出報警和制動控制信號。在幾種典型車輛上對該系統(tǒng)進行了實驗,驗證了方法的正確性和有效性,并能達到較高的測量精度。
1 檢測儀結構特點
該檢測儀由單片機控制反射式紅外線傳感器對駕駛員頭部位置進行檢測,通過檢測駕駛員在常規(guī)坐姿下的頭部與座椅頭枕的相對位置,自動判斷駕駛員是否處在疲勞駕駛狀態(tài)中。
如果駕駛員處在疲勞駕駛狀態(tài)中,頭部必定偏離正常位置并且時間超過設定值,則輸出報警和制動控制信號。檢測儀中的反射式紅外線傳感器由1個紅外線發(fā)射二極管和2個紅外線接收頭組成,紅外線發(fā)射二極管發(fā)射經(jīng)過調(diào)制的38 kHz紅外線光束,安裝在座椅頭枕上前方正對駕駛員頭部的位置,紅外線發(fā)射二極管放置在中間, 2個紅外線接收頭對稱放置在左右兩邊。
2 駕駛員頭部位置分析
在駕駛過程中,駕駛員正常和疲勞時其頭部位置是不同的,側(cè)視圖如圖1所示,圖1 ( a)表示駕駛員在正常駕駛汽車時其頭部位置與座椅頭枕有幾cm的較小距離,而不是完全靠緊頭枕,因為靠緊頭枕駕駛眼睛會感覺很不舒服,不方便觀察距離汽車較近的道路情況。
圖1 ( b)表示駕駛員疲勞駕駛汽車時最常見的開車睡眠姿勢,也是駕駛員最初的疲勞睡眠姿勢,這時駕駛員頭部距離座椅頭枕一般大于15 cm,這種情況下應及時報警,如果持續(xù)2 s就應啟動制動系統(tǒng)自動剎車。但是短暫的其他非疲勞動作,如探身操作儀表板上的開關、回頭觀察等短時動作也有類似的距離變化,這時可以用時間來區(qū)別, 2 s以內(nèi)恢復正常位置的不作為疲勞駕駛判定。
圖1 ( c)表示駕駛員在有意識地短暫休息和閉上眼睛駕駛,但還沒有完全睡著時的姿勢,但這是完全睡著的前奏,其頭部位置緊靠座椅頭枕,距離為0,這種情況下應該及時報警,發(fā)展下去就會演變成圖1 ( b)的情況。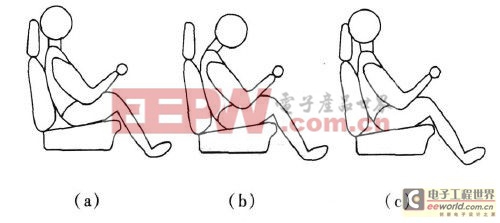
圖1 駕駛員頭部位置側(cè)視圖
圖2為駕駛員頭部的俯視圖,其中圓形代表駕駛員的頭部,箭頭代表紅外線發(fā)射和反射的路線。圖2 ( a)為正常駕駛時駕駛員頭部與紅外線傳感器的相對位置示意圖,紅外線從中間的紅外線發(fā)射二極管發(fā)射出來到被駕駛員頭部反射回左右2個紅外線接收頭,所經(jīng)過的距離基本相等。
圖2 ( b)表示駕駛員疲勞后的頭部位置,是向左或右歪斜的情況,這與圖1 ( b)的典型位置有所不同,是一種中間過渡的疲勞形態(tài),最終也會轉(zhuǎn)化到圖1 ( b)的位置,這時紅外線傳感器將檢測出左右不同的距離,也應及時報警或輸出制動信號。
圖2 ( c)表示駕駛員疲勞后頭部繼續(xù)偏移的位置,一側(cè)的紅外線接收頭已經(jīng)不能接收到被反射回來的紅外線了,在計算機程序中得到距離無限大的結果,這說明駕駛員疲勞程度進一步增強,應及時報警或輸出制動信號。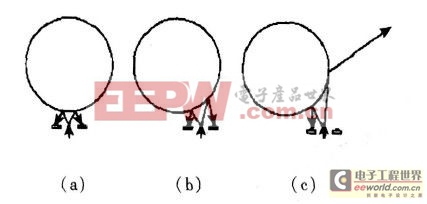
圖2 駕駛員頭部位置俯視圖
3 檢測儀的硬件設計
檢測儀的硬件電路圖如圖3所示,圖中LED為紅外線發(fā)射二極管, IC3、IC4 為紅外線接收頭,MCU 為ATmaga8 單片機。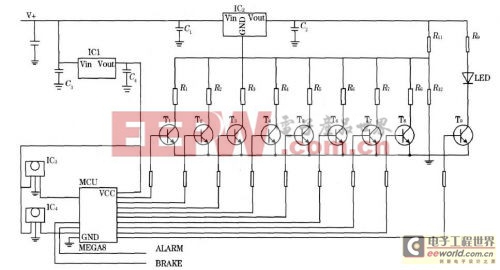
圖3 檢測儀硬件電路
LED發(fā)射38 kHz的紅外線調(diào)制光束,經(jīng)駕駛員頭部反射后會照射到IC3、IC4的接收窗口, IC3、IC4對接收信號進行解調(diào),經(jīng)放大處理后以高或低電平的方式送到單片機MCU的輸入口線,計算機程序?qū)⒖诰€的值送到內(nèi)存保存,供后面的程序作為判斷依據(jù)。
紅外線發(fā)射二極管LED發(fā)射的紅外線的有效檢測距離與通過紅外線發(fā)射二極管的電流是對應的,紅外線發(fā)射二極管LED的電流由三端集成穩(wěn)壓器IC2的輸出電壓決定,三端集成穩(wěn)壓器IC2的輸出電壓受計算機程序輸出的控制字控制。
控制字最大值是二進制11111111d,此時R1 ~R8 全部接地, R12的綜合阻值最小,三端集成穩(wěn)壓器IC2的輸出電壓Vout也最小, LED發(fā)射的紅外線光束的有效距離也最小,適當調(diào)整R1~R8 的數(shù)值,可以將LED發(fā)射的紅外線光束的有效距離調(diào)整到1 cm左右。當控制字最小值是二進制00000000d,此時R1 ~R8 電阻全部懸浮, R12的綜合阻值就是R12 ,三端集成穩(wěn)壓器IC2的輸出電壓Vout最大,紅外線發(fā)射二極管LED發(fā)射出的紅外線光束的有效距離也最大,適當調(diào)整R12的數(shù)值,可以將紅外線發(fā)射二極管LED發(fā)射出的紅外線光束的有效距離調(diào)整到20 cm左右。1~20 cm的有效檢測距離能夠滿足實際需要。












評論