基于單片機的智能無功補償儀的設計

1 引言
隨著電力系統的快速發展,電力網容量不斷增大,結構日趨復雜,電力系統中的自動化設備的運用越來越廣泛。在電力負荷中,有相當一部分是感性負荷,它不僅消耗大量的有用功功率,也吸收大量的無功功率從而造成功率因數下降,導致無功電源不足,系統電壓降低,損耗電能,降低供電能力。因此提高功率因數,可以保證供電系統安全運行并減少電能損耗,節約電能。一般情況下功率因cosφ大于0.9而小于1。由于感性電流是隨機的,因此補償電容器的投切也要隨時跟蹤變化。本文介紹的便是這樣一種智能型無功補償儀器。
2 無功功率的基礎知識
在正弦電路中,負載是線性的,電路中的電壓和電流都是正弦波。設電壓和電流可以分別表示為

式中:
 —電流滯后電壓的相角。
—電流滯后電壓的相角。
電流i被分解為和電壓同相位的分量ip和比電壓滯后 90°的分量iq·ip和iq分別為

電路的有功功率P就是其平均功率,即

電路的無功功率定義為: 
可以看出,Q就是上式中被積函數的第二項無功功率分量uiq的變化幅度。uiq的平均值為零,表示了其能量交換而并不消耗功率。Q表示了這種能量交換的幅度。在單相電路中,這種能量交換通常是電源和具有儲能元件的負載之間進行的。從上式可以看出,真正的功率消耗是由被積函數的第一項有功功率分量uip產生的。因此,把上式所描述的ip和iq分別稱為正弦電路的有功電流分量和無功電流分量。
對于發電機和變壓器等電器設備來說,其額定電流值與導線的截面積及銅損耗有關,其額定電壓和繞組電氣絕緣有關,在工作頻率一定的情況下,其額定電壓還和鐵心尺寸及鐵心損耗有關。因此,工程上把電壓電流有效值的乘積作為電器設備功率設計極限值,這個值也是電器設備最大可利用容量。因此,引入如下視在功率的概念:
S=UI
可知,有功功率P的最大值為視在功率S,P越接近S,電氣設備的容量越得到充分的利用。為反映P接近S的程度,定義有功功率和視在功率的比值為功率因數  。
。

可以看出來,在正弦電路中,功率因數是由電壓和電流之間的相角差決定的。在這種情況下,功率因數常用cosφ來表示。
P、S和Q有如下的關系:

應該指出,視在功率只是電壓和電流有效的乘積,它并不能準確反映能量交換和消耗的強度。在一般電路中,視在功率并不遵循能量守恒定律。
3 動態無功補償裝置原理及硬件框圖
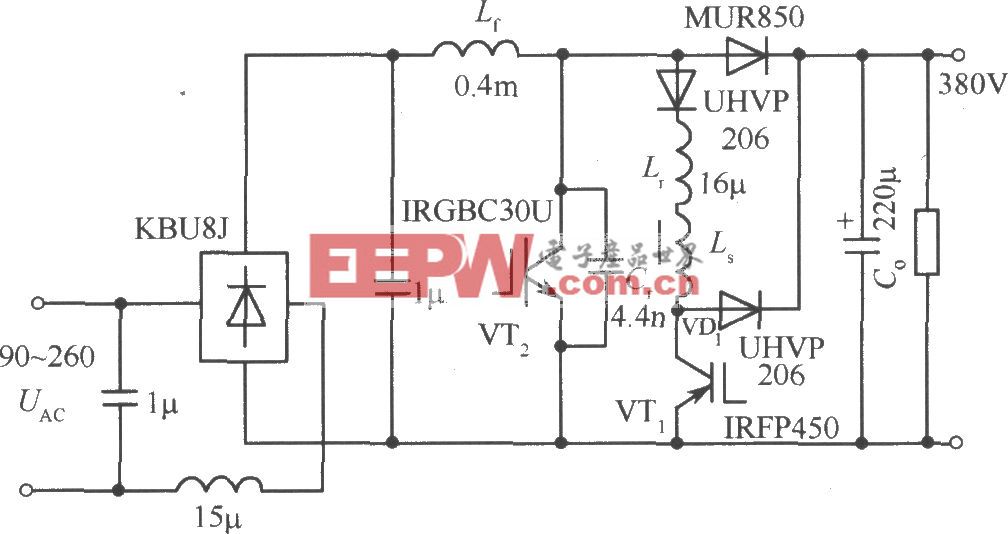
供電系統為220伏或380伏的電壓,我們通過一個硬件電路將此220伏或380伏的電壓轉換為 0~5伏的電壓,然后通過A/D轉換器將此電壓信號讀到單片機中,在單片機中我們已經事先編寫好了算法程序。可以通過此程序來判斷此供電系統是否需要進行無功補償,即cosφ的值是否大與0.9,如果小于0.9則需要進行無功補償。從而控制電容開關的斷開和閉合完成無功補償。
3.1 控制器工作原理及硬件組成
低壓無功補償系統的工作原理框圖如圖1,
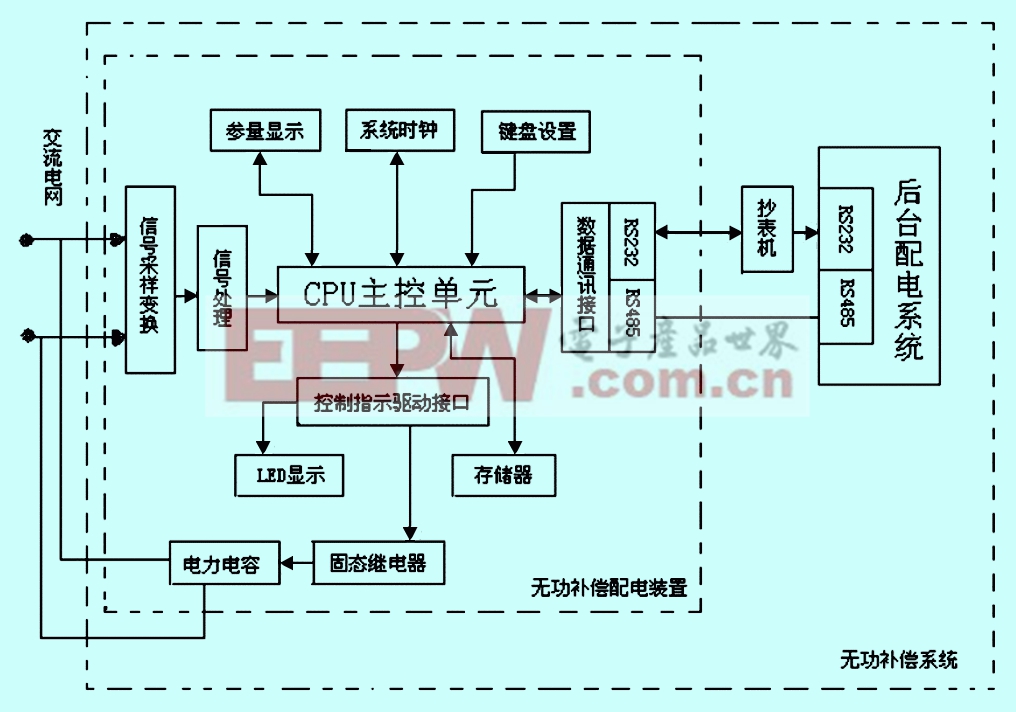
圖1 低壓無功補償系統的工作原理框圖
該系統主要由控制器、無功補裝置、后臺配電管理系統和系統工作電源等組成。
主控制器在一個工頻周期內等間隔地采集32個瞬間電壓、電流數據后,經微處理器處理計算出電網電壓、電流(包括零序電流)、功率因數、無功功率、有功功率、電壓電流1~11次諧波等負荷參數值,存儲并送參量顯示單元顯示,同時根據現場的實際情況通過控制器鍵盤設置參數來控制電容投切。因此該控制器具有負荷監測和無功補償雙重功能。控制器輸出驅動接口,根據用戶設置能夠實現三相共補和分相補償,因此不必考慮三相負荷的不平衡。電容投切采用“循環投切”方式和“共補先投、分補后投、投過不投,故障速切”的原則。另外,控制器通過數據通訊接口將記錄的數據送給抄表機或直接送給計算機,利用配套的后臺管理系統軟件進行查詢、統計、報表輸出、曲線打印等。
4 系統軟件的組成與設計
本系統采用C語言編程,軟件模塊總體可分為以下兩個部分。
4.1 中斷部分
中斷部分由以下四部分組成:
(1) 定時中斷。為系統的延時操作提供計時。例如:主程序部分的運算模塊每30s運行一次,它的定時由定時中斷計時。
(2) 鍵盤管理中斷。接收鍵盤鍵入的鍵值,鍵值分為兩種功能:查看數據(通過LCD顯示)和設置系統參數。
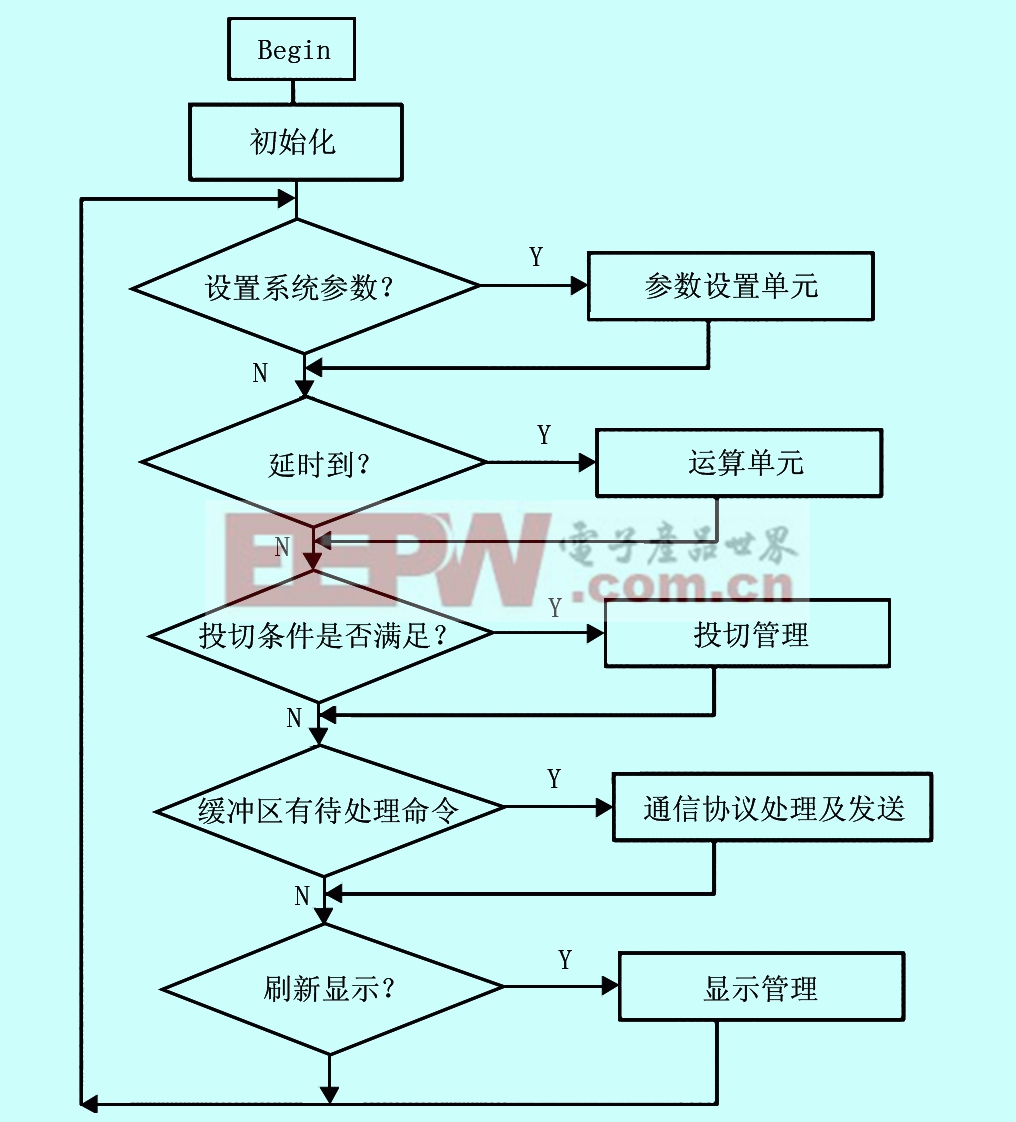
圖2主程序
(3) RS-485通信中斷。判斷是上位機發送來數據引起的中斷還是下位機發送來的數據引起的中斷。接收遠端發送來的數據。首先將接收數據放入數組,一幀數據接收完成則存入接收/發送緩沖區,并置有效標志待主程序的通信協議處理及發送單元處理。
(4) 串口中斷。通過RS-232可進行現場測試數據、調試程序以及設置系統參數。RS-232接收數據處理過程與RS-485基本相同。
4.2 主程序部分
主程序有以下六部分組成(如圖2)。
(1) 初始化單元。對變量初始化以及對外設初始化。
(2) 設置系統參數單元。設置電壓、電流變比,過電壓、過電流閾值以及系統地址(形成網絡連接以后,本系統的識別碼)等參數。
(3) 運算單元。包括對輸入到ACH的模擬信號進行等間隔采樣(等間隔采樣利用HSO啟動),并對采樣值進行FFT運算,對電力諧波進行分析,以得到電壓、電流值,畸變率以及有功功率、無功功率等參數。
(4) 投切管理單元。將運算結果與設定閾值進行比較,綜合考慮投切條件,以正確控制電容器投切。
(5) 通信命令處理及發送單元。對RS-485通信中斷和串口中斷接收的命令進行處理并依照協議發送數據。其中,三種串口的接收數據緩沖區分別可緩存十五幀數據。
(6) 顯示管理單元。通過判斷鍵入鍵盤的鍵值,顯示相應的數據,如:電壓、電流、無功功率、有功功率等值。
5 交流采樣值的算法實現。
5.1 f(t)的有效值A計算
設f(t)為周期為T的連續信號,最大值為Am。則f(t)的有效值A可表示為:

講連續函數離散化,可得出電壓、電流有效值表示式

式中, N—每個周期均勻的采集點數;
ui—第i 點的電壓采集值;
ii—第i 點的電流采集值;
Ku—電壓有效值的綜合轉換系數,是定值;
KI—電流有效值的綜合轉換系數,是定值。
5.2 三相功率P、Q的計算
由連續周期函數的功率定義可得到離散的功率表示式。
單相功率的算式為:


同理,三相功率P、Q的算式如下:


由P和Q即可以計算出cosφ的值。
6 結束語
本裝置以單片機為控制核心、控制較為方便、性能穩定可靠、價格低廉。系統不僅具有配置靈活適應性強的特點而且安裝調試方便、易于監視和維護。具有良好的經濟、社會效應,應用前景廣闊。









評論