打造機器人安全新維度,詳析實時安全氣泡探測架構

機器人的普及程度越來越高,目前正在逐漸提高在各行各業的效率和生產力。然而,為了確保周邊人員和資產的安全,機器人必須配備碰撞檢測和停止功能,安全氣泡探測器可以探測指定安全區域內是否存在物體或人員。
本文引用地址:http://www.czjhyjcfj.com/article/202504/469880.htm本文重點介紹如何使用ADI公司的EVAL-ADTF3175D-NXZ飛行時間(ToF)平臺實現安全氣泡探測器應用。ADTF3175模塊具有75°的視場(FoV)。如需在實際應用中覆蓋更寬的視場,則可以組合使用多個傳感器。例如,為了覆蓋270°的視場,則需使用四個模塊。安全氣泡探測算法在EVAL-ADTF3175D-NXZ平臺的i.MX8MP處理器上運行,可以捕獲來自傳感器的深度圖像,并探測安全氣泡半徑內的任何物體。為了便于集成到機器人應用中,通常借助機器人操作系統(ROS)框架來實現安全氣泡探測應用。該算法經過高度優化,在此平臺上實現了30 FPS幀率。安全氣泡探測器是自動導引車(AGV)和自主移動機器人(AMR)的基本組成部分。相關安全區通常用AGV/AMR周圍的虛擬圓形區域表示,如圖1中的紅色圓圈所示。
圖1. 安全氣泡探測器
安全氣泡探測器是AGV/AMR系統必不可少的組成部分。圖2中的安全氣泡探測器由四個EVAL-ADTF3175DNXZ模塊構成,覆蓋278°的視場。這些模塊呈水平分布,飛行時間(ToF)模塊之間彼此相隔67.5°,這種配置有助于減少盲點,呈現278°的視場。
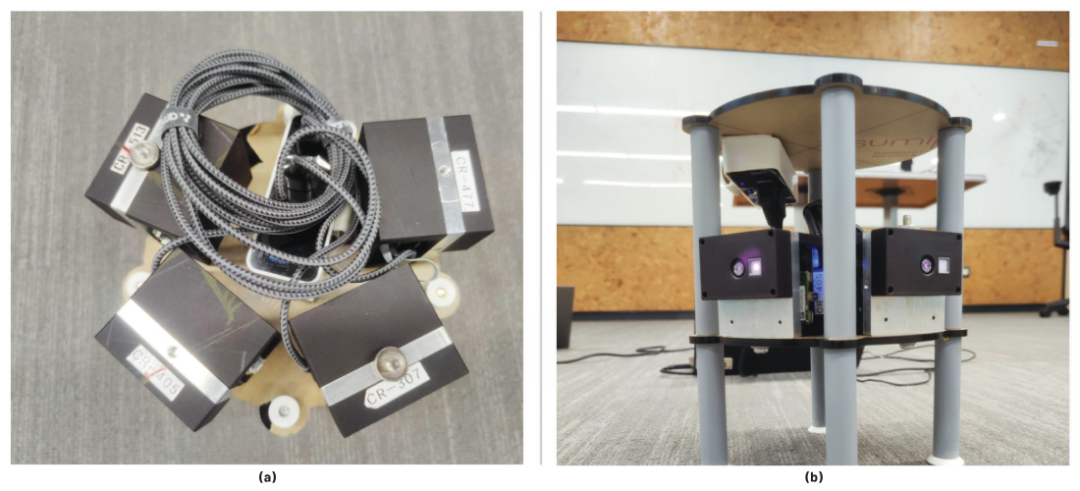
圖2. 水平設置。(a)頂視圖;(b)前視圖
為了方便ToF模塊和主機系統之間的通信,系統采用ROS發布者訂閱者模型,如圖3所示。此設置使用Ethernet over USB進行通信,以確保數據完整性并提高通信速度。
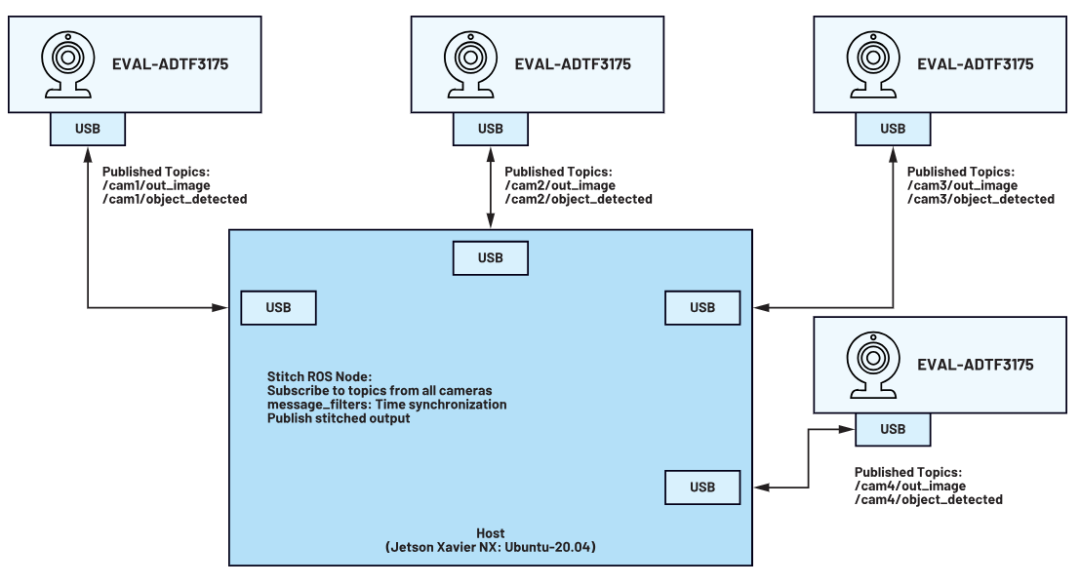
圖3. 主機作為訂閱者、ROS 節點 作為發布者的架構
系統采用安全氣泡探測算法來探測安全氣泡半徑內的物體。探測標志以ROS 話題(Topic)的形式傳輸,主機可以訂閱所有模塊的話題,并合并各個探測結果。此外,這些模塊還可發布深度圖像、紅外圖像和輸出圖像以供進一步分析。ROS提供了有效的可視化工具,例如rviz,它可以將發布的話題可視化。該應用設計為高度可配置的,將參數傳遞給ROS節點即可調整攝像頭位置、旋轉角度和其他配置值。
該應用實現了多線程架構,如圖4所示。輸入、處理、輸出三個線程并行運行。該設計旨在有效減少延遲,確保持續對最新可訪問幀運行算法模塊。輸入線程從ToF模塊讀取圖像并更新輸入隊列,而處理線程獲取輸入隊列并運行安全氣泡探測算法,發布探測到的標志并將輸出推送到輸出隊列。輸出線程讀取輸出隊列并發布話題以實現可視化。在實時場景中,當算法模塊的幀速率低于輸入線程時,先前未來得及處理的的幀將被丟棄,從而以最小延遲優先處理最新的幀。
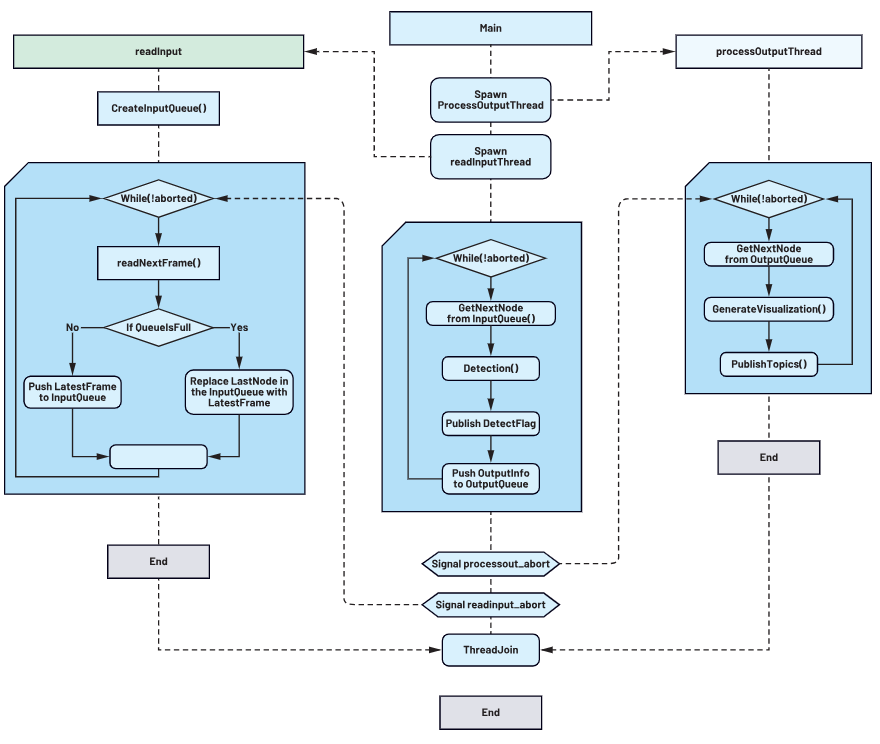
圖4. 多線程程序
主機和ToF模塊之間的通信采用TCP/IP協議,通過ROS發布者-訂閱者模型進行。主機將來自ROS節點(ToF模塊)的已發布輸出圖像合并,并發布合并后的輸出。
如圖5所示,主機是NVIDIA ? Jetson Xavier NX,利用Ethernet over USB協議為所有四個ToF模塊供電并與之通信。安全氣泡的默認半徑為一米,這可以在ROS啟動文件中進行配置。如果在該區域內探測到物體,則會觸發設置中的物體探測標志,并通過ROS主題發送到主機。主機訂閱每個ToF模塊的物體探測話題。結果通過簡單的邏輯工作范圍OR(或)運算合并。如果任何一個傳感器在安全氣泡內探測到物體,合并后的結果就會指示存在物體。

圖5. 采用NVIDIA Jetson Xavier NX的水平設置
為了實現可視化,傳感器將獲取的圖像轉換為頂視圖,并根據物體位于安全氣泡內部還是外部,用綠色和紅色像素標記物體。各傳感器也會將此圖像作為ROS話題發布,隨后主機將它們合并成組合圖像。圖6為所有已發布輸出圖像主題的組合圖像。
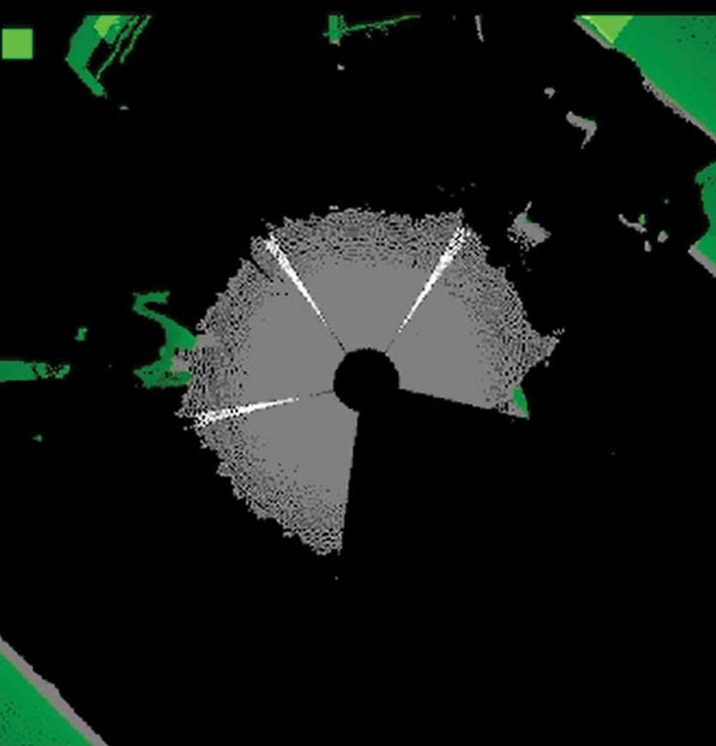
圖6. 四個TOF模塊的組合頂視圖
為了實現可視化,在左上角繪制一個方框來顯示物體探測狀態(綠色:未探測到物體;紅色:探測到物體)。參見圖7。
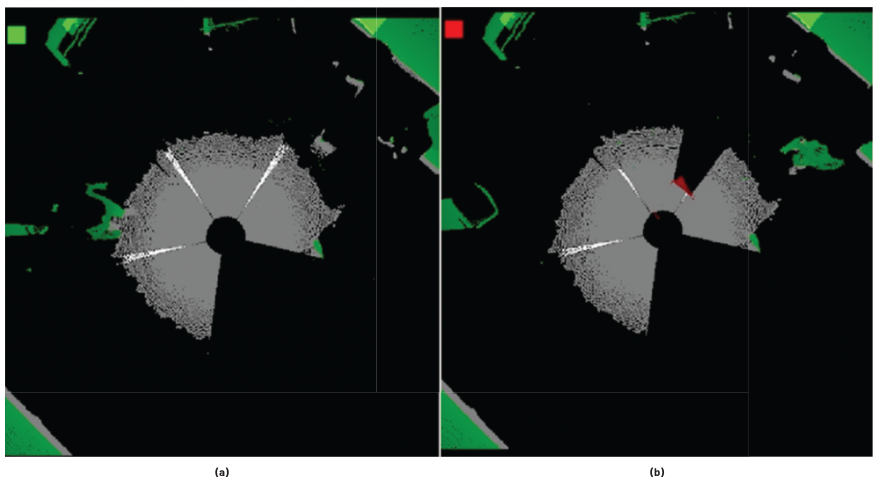
圖7. 可視化。(a)未探測到物體;(b)探測到物體
這些圖像可以通過ROS工具rviz進行可視化。此外,NVIDIA Jetson Xavier NX可以通過HDMI線連接到顯示器,以便查看輸出。為了進行分析,我們可以啟用輸入圖像的深度圖像、點云和頂視圖等可視化功能。這些可視化功能為探測到的物體及其空間關系提供更詳細的信息和洞察。參見圖8。
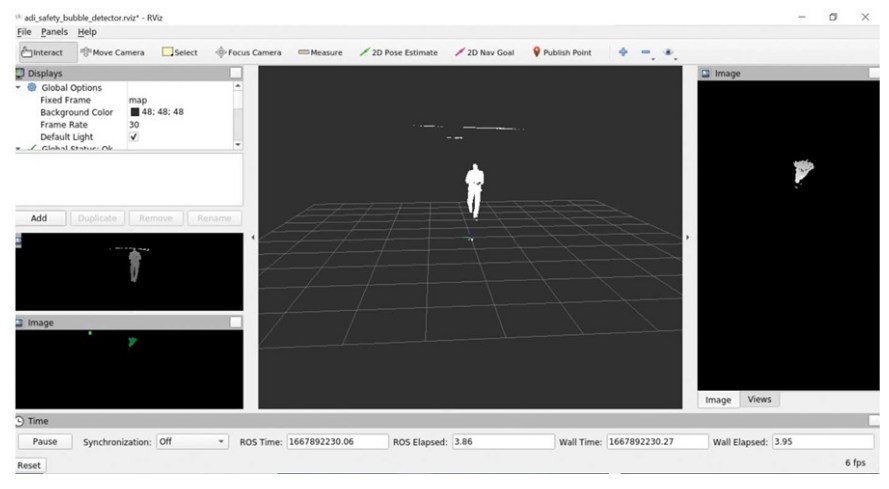
圖8. 可視化(用于分析的調試圖像)
![]()
所用SQA流程
采用標準軟件質量保證(SQA)方法來確保軟件的安全性和質量。
單元測試:ROS支持多級別的單元測試。
庫單元測試:測試獨立于ROS的庫。
ROS節點單元測試:節點單元測試啟動節點及其外部API,即已發布話題、已訂閱話題和服務。
代碼覆蓋率:代碼覆蓋率分析由ROS的一個工具包完成,有助于消除從未被執行的“死代碼”并提高單元測試質量。
文檔:ROS有一個工具包ros_doc_lite,它能為源文件生成doxygen格式的文檔。
使用Clang格式來格式化代碼,并使用Clang-tidy來維護ROS編碼風格指南。
安全氣泡探測器能夠可靠地探測各種形狀、顏色和尺寸的物體,包括厚度僅5毫米的電纜。
算法的延遲非常低,只有30 ms,可確保實時探測物體并作出響應。
由于充分利用了ROS框架來構建用戶界面和提供可視化功能,該應用具有高度可移植性,可兼容任何使用ROS的主機,幫助縮短客戶產品的上市時間。
對于透明和低反射物體,ToF傳感器的準確度較低。因此,對玻璃瓶和塑料球等物體,會出現探測滯后。例如,圖9顯示了算法探測到物體的距離(安全半徑設置為100 cm)。y軸代表測試對象。玻璃瓶(12, 7)表示玻璃瓶高12 cm,寬7 cm。如果括號中只有一個參數,則它表示物體的半徑或立方體的邊長。表1總結了安全氣泡探測器的規格。
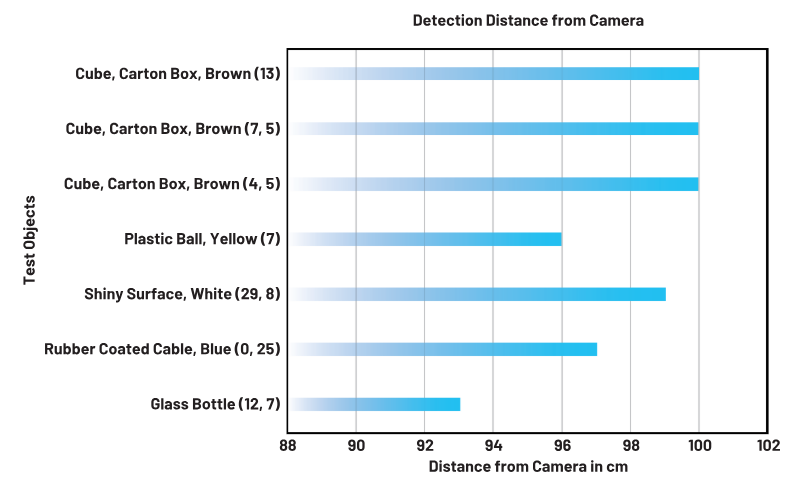
圖9. 探測準確度

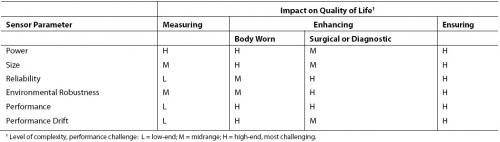
表1. 安全氣泡探測器規格
結論
這款由ADTF3175D和EVAL-ADTF3175DNXZ ToF平臺組成的安全氣泡探測器具有許多優勢。它針對i.MX8MP平臺進行了高度優化,實現了30 FPS的流暢性能;而且采用多線程方法來有效減少延遲,確保快速響應;此外還實施了SQA方法來確保軟件安全并維護質量標準。








評論