賦能高精度驅動與實時控制,ADI如何重塑人形機器人運動核心

在具身智能領域,人形機器人無疑是最值得期待的產品類別,有著更高的市場熱度和更大的發展潛力。然而,要釋放人形機器人的市場潛力,研發企業仍需攻克一系列挑戰, 涉及定位、感知、連接、控制、電源管理等 多個維度。 本文將聚焦于其核心的高精度驅動與實時控制技術,展示ADI如何提供從指尖到關節的全棧解決方案,賦能機器人實現更卓越的運動性能。
本文引用地址:http://www.czjhyjcfj.com/article/202505/470993.htm
靈巧手全集成伺服電機驅控方案
機器人的靈巧手是其與物理世界進行復雜交互的關鍵,其多自由度、高集成度的特性對電機驅動控制方案提出了極高要求:既要體積小巧,又要能精確控制多個微型電機,同時簡化布線和系統復雜度。對此,ADI Trinamic靈巧手集成驅動控制方案 提供了革命性的解決方案。
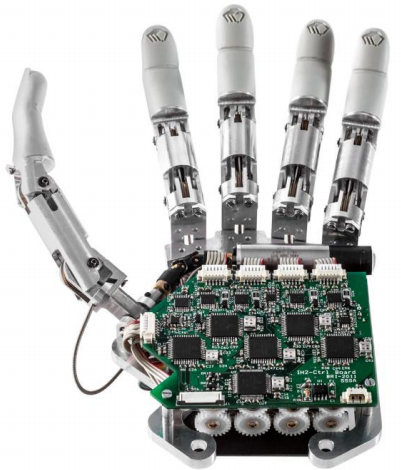
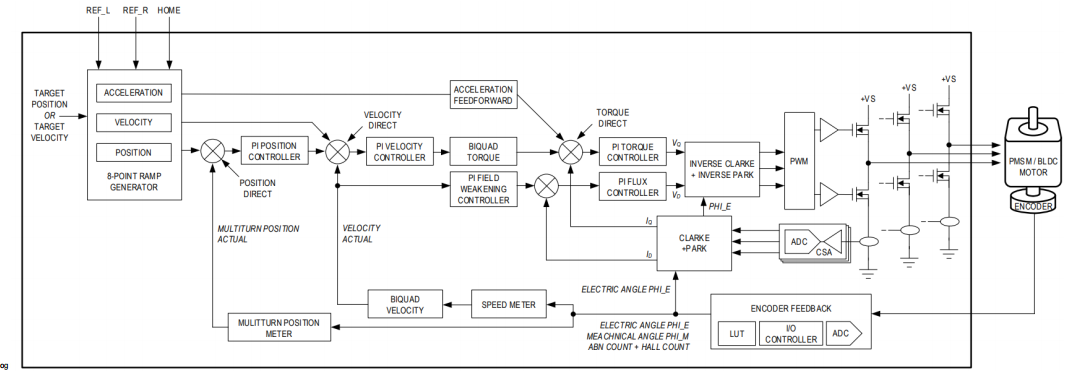
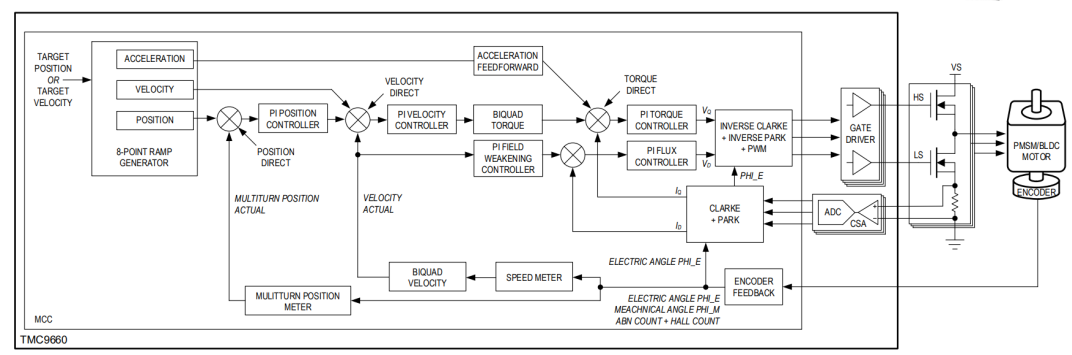
這是一款全集成的36V智能FOC伺服驅動控制芯片,支持PMSM/BLDC及有刷伺服電機。其內部集成了完整的無損電流檢測、位置/速度/力矩閉環控制以及高達200kHz的PWM頻率,非常適合控制低電感空心杯電機。通過SPI菊花鏈方式,僅需少量引線即可級聯控制多達數十個芯片。這不僅 極大降低了系統布線的復雜度、節省了寶貴的PCB空間 ,還將運動控制任務從主控MCU中卸載,使主控資源能最大限度地用于大模型運算等高級AI任務,提升機器人整體算力。
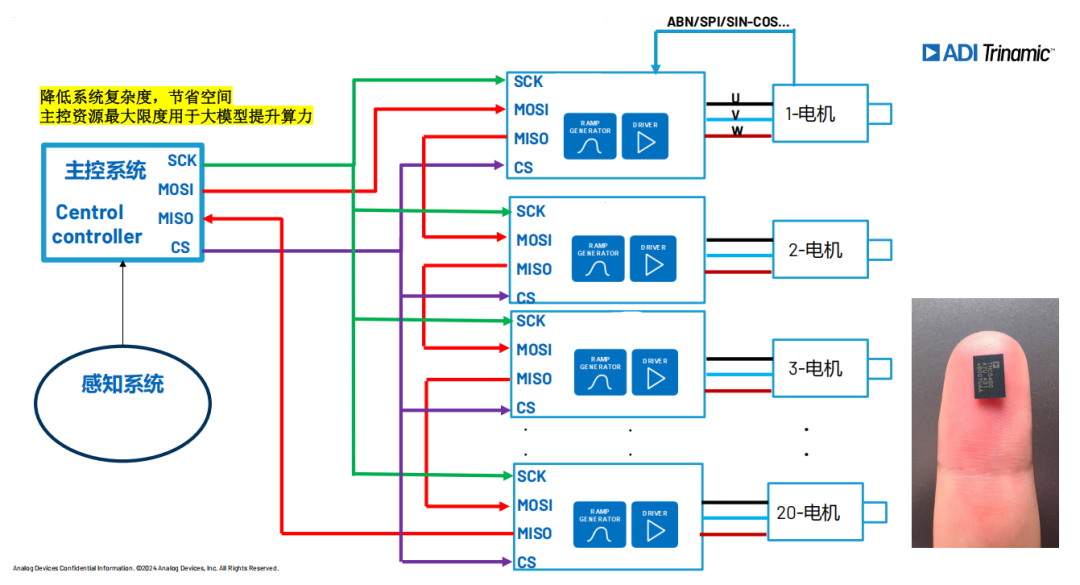
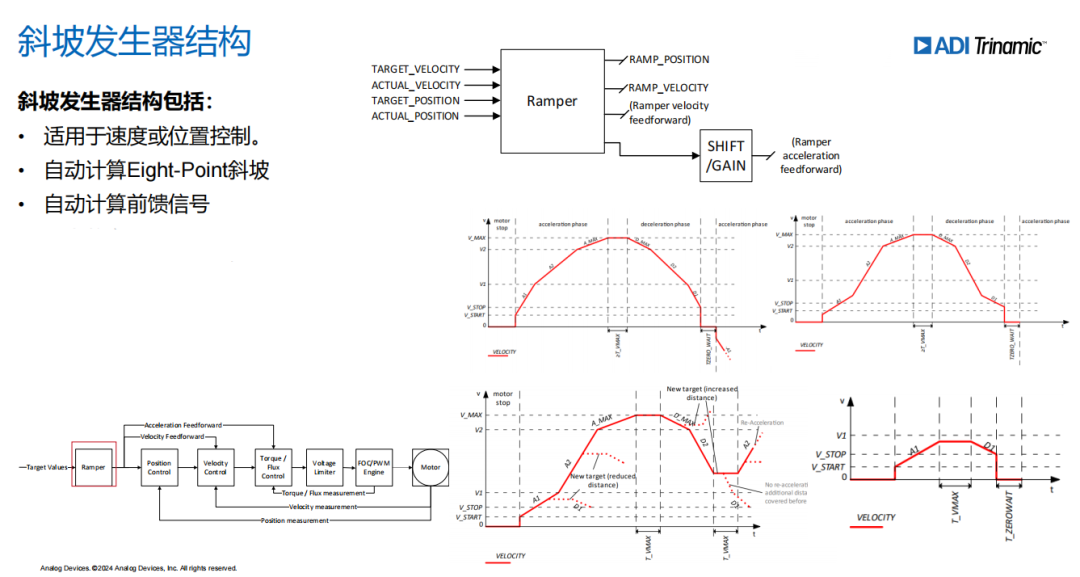
內置硬件FOC引擎,開發者無需編寫復雜的FOC算法代碼,即可實現電機的高效率、平穩靜音及快速動態響應控制。 其集成的8點加減速軌跡曲線運動控制EightPoint Motion Controller能減少運動抖動,實現平滑的加減速控制。
關節伺服電機高集成驅控方案
伺服關節是機器人的力量之源和運動之樞,其性能直接決定了機器人的負載能力、運動精度和動態響應。ADI Trinamic為不同功率等級和集成需求的伺服關節提供多樣化的解決方案。

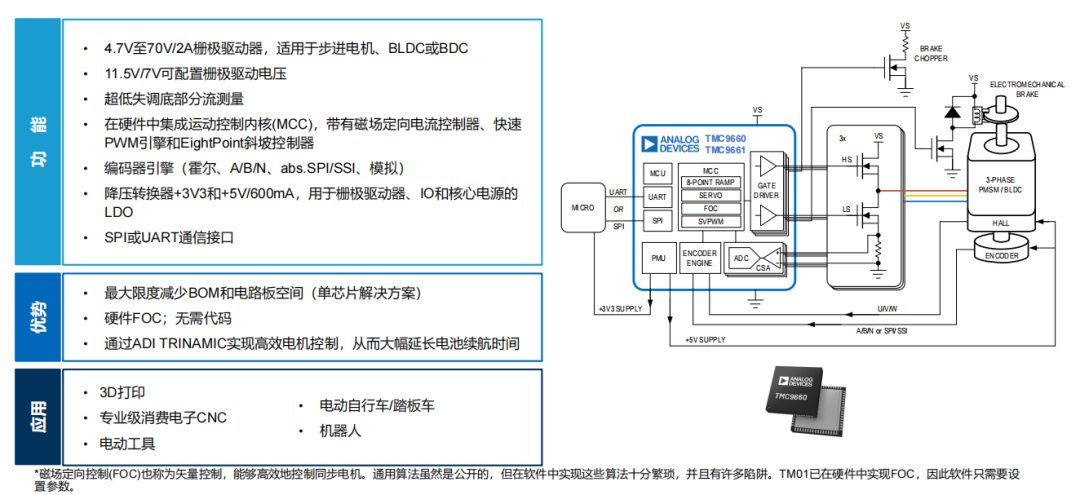
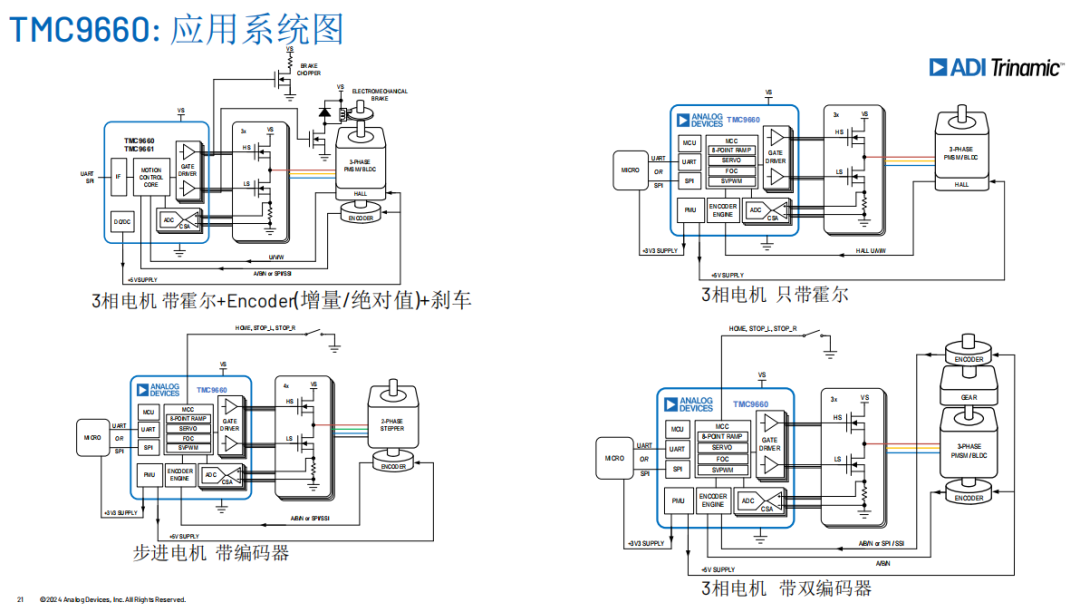
高集成單片伺服驅控芯片 TMC9660
該芯片集成了MCU、伺服三環控制(位置、速度、電流)、70V/2A智能柵極驅動器(GDRV)、運放、LDOs及Buck轉換器。開發者僅需外置功率MOSFET即可構成完整的伺服驅動單元。同樣內置硬件FOC,無需繁瑣的軟件算法開發。MCC支持高達100kHz的伺服環路控制及8點Ramp軌跡發生器,確保高效、精準的運動控制。
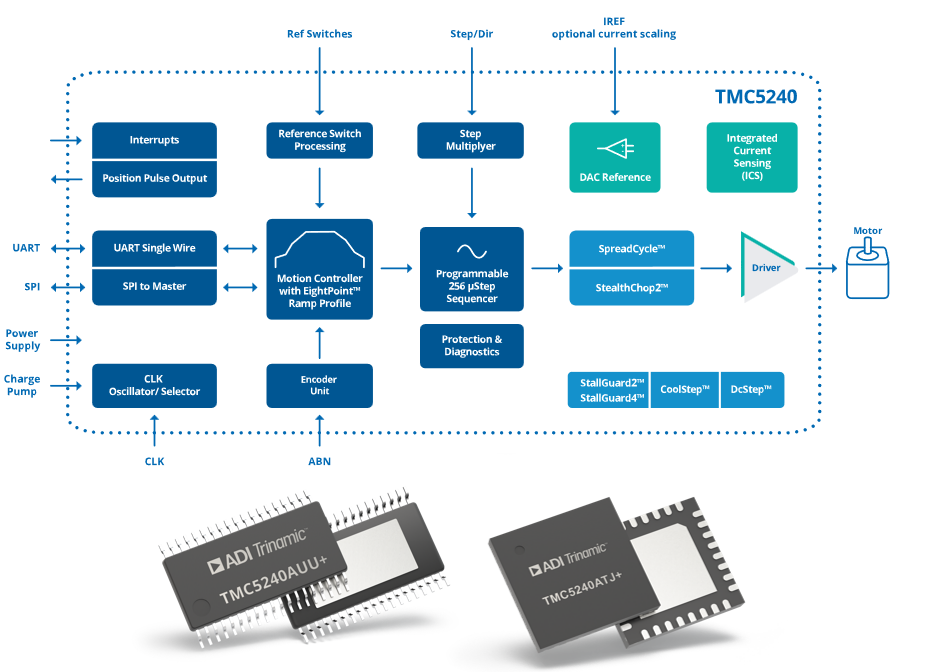
高性能步進電機驅動器 TMC5240
TMC5240 是一款智能高性能步進電機控制器和同樣集成”八點”加減速規劃的運動控制芯片, 具有串行通信接口(SPI,UART)和廣泛的診斷能力。結合了一個靈活的, 優化的抑制抖動斜坡發生器用于自動定位,采用行業最先進的步進電機驅動技術,該驅動基于256微步細分內置分度器和完全集成的 36V、2.1A(IRMS)、峰值3.0A、H橋(每個H橋的最大輸出電流為IMAX=5.0AMAX,超過5A會保護)以及非耗散集成電流傳感器 (ICS)。精密的stealthChop2?斬波器確保絕對無噪音運行,同時具有最高效率和最佳電機轉矩,靜音模式到高速度模式的切換,無抖動。
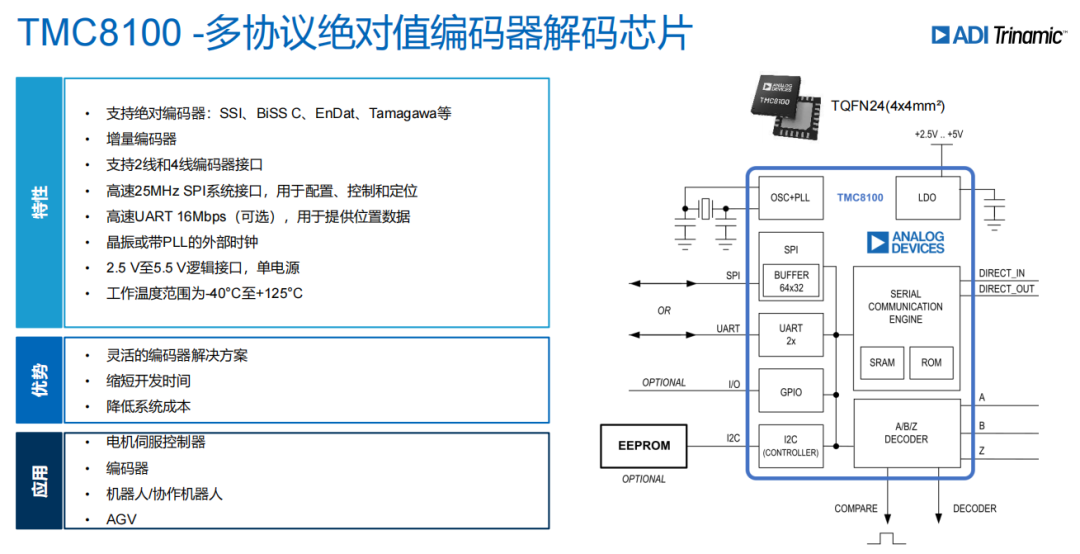
多協議絕對值編碼器解碼芯片 TMC8100
TMC8100支持SSI、BiSS C、EnDat、Tamagawa等多種主流絕對值編碼器協議,以及增量編碼器接口。能夠 通過SPI或高速UART與主控制器通信,為伺服關節提供精確、可靠的位置反饋,是實現高精度機器人運動控制的關鍵一環。它常與TMC6460或TMC9660等驅動芯片配合使用,處理復雜的編碼器信號。
智能伺服電機剎車/電磁閥驅動方案
除了核心的旋轉關節,機器人系統中還包含大量的電磁閥和電磁剎車。對這些部件的高效、智能驅動同樣重要。
智能串行通訊螺線管/電磁閥/直流電機驅動器 MAX22216/MAX22217
這兩款產品(MAX22216為1.7Arms,MAX22217為0.55Arms)提供多通道獨立的半橋驅動,支持電壓驅動(VDR)和電流驅動(CDR)控制模式。 電流驅動模式能克服線圈電阻變化和輸入電壓波動帶來的影響,實現更精確的力控制,同時節省功耗、減少電磁閥磨損。
同時,具備ON/OFF狀態檢測、溫度估測、開路負載檢測等診斷功能 ,能夠通過監測電流變化自動檢測電磁閥柱塞的動作完成(END_HIT_AUTO),從而在最佳時間點從沖擊電流(Hit Current)切換到保持電流(Hold Current),進一步優化能效并提升系統響應速度。
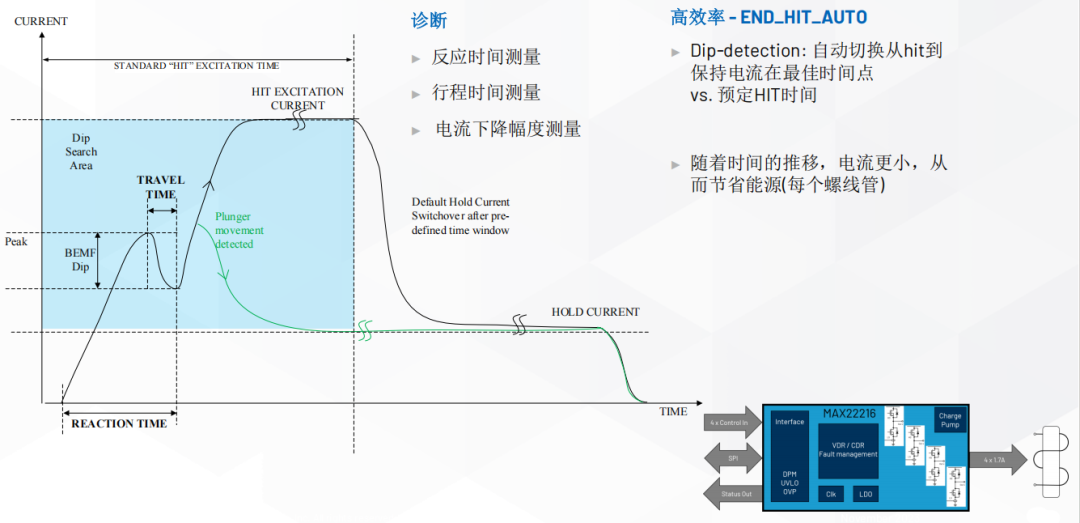
柱塞檢測







評論