基于PIC16F874單片機的噴織機的控制系統(tǒng)

關(guān)鍵詞:PIC單片機;紡織機;松緊度調(diào)整;檢測
正在運行的紡織機因故障、交班等其他原因需要停機后,再開機時就會出現(xiàn)緯線之間不均勻現(xiàn)象,不是2條緯線之間間隙過大,就是間隙太小,結(jié)果都會使所織布匹出現(xiàn)次品,雖然一次停機造成損失不太大,但由于停機是經(jīng)常性的,積累起來的損失就大了。所以需要在每次重新開機前對緯線進行松緊調(diào)整,由于其精度高,手動調(diào)整很難調(diào)到最佳狀態(tài),且費時費力。本控制器基于PIC16F874單片機設(shè)計了紡織機松緊度調(diào)整控制器,成功地解決了該問題。具有精度高、運行可靠方便、性價比高等優(yōu)點。
1 控制器工作原理
松緊度調(diào)整控制器是一個獨立的控制部件,安裝在紡織機的機身上,其控制系統(tǒng)由檢測電路、輸出控制電路、設(shè)定顯示電路等幾部分組成。控制器原理框圖如圖1所示。

紡織機在正常運行時,調(diào)整離合器在單片機PIC16F874的控制下,處于可靠分離狀態(tài),以保證紡織機的正常運行。當因故停機后需再次開機時,按下調(diào)整按鈕,系統(tǒng)發(fā)出調(diào)整信號使調(diào)整離合器控制電路工作,調(diào)整離合器處于嚙合狀態(tài),此時調(diào)整電機在系統(tǒng)的控制下進行正轉(zhuǎn)、反轉(zhuǎn)、正反轉(zhuǎn)和反正轉(zhuǎn),調(diào)整緯線松緊量使其疏密合適(其松緊量由工人根據(jù)所織物的不同事先設(shè)定,并存儲在E2PROM中),調(diào)整結(jié)束后,使調(diào)整離合器由回到分離狀態(tài),并顯示松緊調(diào)整結(jié)束信號。當啟動紡織機時調(diào)整離合器被鎖定在分離狀態(tài)。
2 硬件電路設(shè)計
根據(jù)系統(tǒng)的功能,可靠控制是前提,精度是關(guān)鍵。硬件力求結(jié)構(gòu)簡單提高可靠性,而精度通過精密變速機構(gòu)和檢測電路保證。以下將對控制系統(tǒng)的微處理器(MCU)的選擇及檢測部分、控制部分、設(shè)定與顯示部分的設(shè)計進行介紹。部分硬件電路如圖2所示。
2.1 MCU選擇
由于系統(tǒng)的調(diào)整精度要求高,能方便地設(shè)定調(diào)整量并能起掉電保護作用。美國Microchip公司的PIC16F874單片機能滿足系統(tǒng)的這些要求。PIC16F874內(nèi)含10 b A/D轉(zhuǎn)換,速度高,價格便宜,他帶有128 B的電可擦寫的E2PROM存儲器,能方便寫入調(diào)整量以備后用。16F874還有看門狗,保證系統(tǒng)程序運行的可靠性,同時同步串行模塊(SSP)為以后與工控機聯(lián)網(wǎng)奠定基礎(chǔ)。

2.2 檢測電路
檢測部分主要完成對調(diào)整離合器的狀態(tài)、紡織機等檢測,同時采用光電編碼器提高了檢測精度,為了保證MCU的安全,所有檢測信號都通過光耦和MCU連接。其電路如圖2所示。
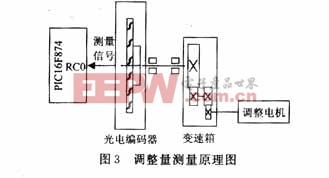
2.3 調(diào)整量設(shè)定與顯示
為了提高調(diào)整精度,采取了以下措施:采用精密的齒輪減速機構(gòu);提高PIC16F74工作頻率為20 MHz,一條指令執(zhí)行時間只有1μs,從而提高了調(diào)整精度。如圖3所示。顯示電路用于顯示設(shè)定調(diào)整量。單片機的RD0~RD6作為數(shù)碼管段選信號, RE0~RE2作為數(shù)碼管片選信號,DS1用于顯示正轉(zhuǎn)、反轉(zhuǎn)、正反轉(zhuǎn)和反正轉(zhuǎn);DS2,DS3顯示設(shè)定的調(diào)整量。具體調(diào)整量通過S1,S2,S3,S4 按鍵設(shè)定來實現(xiàn)。
2.4 控制電路
本系統(tǒng)完成的控制有主電機鎖定、離合電機、調(diào)整電機。分別由單片機I/O端口RA0,RA1,RA2和RA3輸出控制。為了保證單片機的安全,所有輸出的控制信號經(jīng)過光耦隔離、三極管放大驅(qū)動控制繼電器和場效應(yīng)管,使紡織機達到快速可靠的控制,以保證調(diào)整精度。
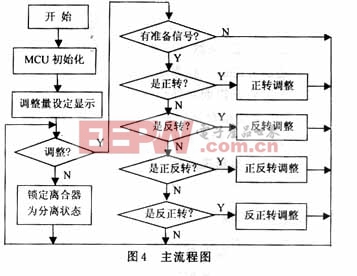
3 軟件設(shè)計
在軟件設(shè)計中,采用模塊化結(jié)構(gòu)。整個程序由主程序及各個功能子程序、中斷服務(wù)程序組成。系統(tǒng)軟件流程圖如圖4所示,主要包括初始化調(diào)整量設(shè)定、顯示,檢測控制離合器的工作狀態(tài),調(diào)整電機工作狀態(tài)控制。
該系統(tǒng)結(jié)構(gòu)簡單,運行穩(wěn)定可靠,控制精度高,具有完善的保護功能,并為以后的技術(shù)改進留有一定的資源,成本低,經(jīng)用戶使用后反映良好。
參考文獻
[2] 竇振中.PIC系列單片機原理和程序設(shè)計[M].北京:航空航天大學出版社,1999.
[3] PIC16CSX8 Bit RISCMicrocontroller Family,Microchip Technology Inc.,1991.












評論