基于單片機的電力補償裝置控制系統設計

關鍵詞:電力補償;80C196KC;控制系統;單片機
電力補償裝置是對電網實施無功補償,提高電網的功率因數,讓無功功率基本就地平衡,降低線損,改善電壓質量和提高線路及變壓器的輸送能力。目前在電力補償系統中有多種補償方法,本文中的補償系統是根據尋優負序電流最小進行補償的。系統計算需要對交流電一個周期20 ms內對單相電壓u、電流I進行采樣,要求一個周期內采樣次數至少在100次以上。針對這一特點,設計了基于80C196KC的控制系統。Intel公司的高性能16 b單片機80C196KC,其運算速度快,能夠滿足系統高速采樣的要求。
1 系統硬件設計
本系統的硬件部分主要由采樣輸入電路、中央控制單元、程序存儲單元、輸出驅動電路4部分組成。系統總體框圖如圖1所示。
1.1 模擬輸入電路
系統中數據采集所使用的傳感器為電壓互感器和電流互感器,需要分別采集三相的電壓和電流,共需要六路輸入。80C196KC內有一個逐次逼近型的A/D轉換器,共有8個輸入通道。其輸入引腳ACH0~ACH7與P0.0~P0.7共享。內部的A/D轉換器8 b/10 b可調,自帶采樣、保持電路,這樣減少了外圍電路,也減少了干擾和干擾源,增加了系統的穩定性和抗干擾性,并且減少了控制板的尺寸。在本系統中采用10 b轉換方式。

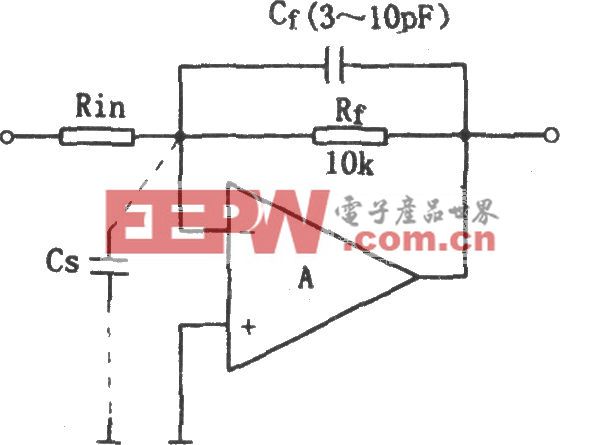
為了保護A/D轉換器,增加可靠性,在A/D通道的輸入端,可采用如圖2所示的輸入接口電路。

其中2個二極管D1和D2起過載保護作用,當輸入電壓高于VREF+0.7 V左右時,D1導通,輸入電平被箝位在VREF+0.7 V的水平上;當輸入電壓低于-0.7 V的水平上。這種過載往往是尖峰干擾,持續時間很短。MCS-96的技術條件規定模擬輸入端對模擬地ANGND的電壓不能低于-0.3 V,這一點可靠輸入端的低通濾波器R4和C1來保證。圖中此濾波器的時間常數τ=R4C1=2700.01=2.7μs,若以-0.7 V作為此濾波器的階躍輸入,則此濾波器輸出端(即80C196KC的模擬信號輸入端)達到-0.3 V的電平需耗時:
t=-τln(1-0.3/0.7)=1.15μs
而通常這類尖峰噪聲的峰值持續時間遠小于上述時間,因此,這一輸入電路可有效地起到過載保護作用。
1.2 中央控制單元
80C196KC是CHMOS高性能16 b單片機中的一個新分支,內部EPROM/ROM為16 b,內部RAM為488 b,有24 b的專用寄存器。80C196KC中采用了“垂直窗口”結構,使得新增的256 b RAM通過窗口映射同樣可以作為通用寄存器來訪問。80C196KC可以采用16 MHz的晶振,內部時鐘是2分頻,其運行速度比12 MHz的80C196KB快33%,比12 MHz的8096BH快1倍。最小電路是指能使單片機工作而所加的最少的外圍設備,一般包括復位電路和晶振。80C196KC的最小電路如圖3所示。

1.3 輸出單元
輸出共有12路,其中P1.0~P1.3控制A相,P1.4~P1.7控制B相,HSO.0,HSO.1,P2.6,P2.7控制C相。輸出經過光控可控硅MOC3061進行隔離,又經一級雙向晶閘管驅動后,加在雙向晶閘管的控制級,控制雙向晶閘管的導通,進而控制電容器的投切。輸出電路如圖4所示。

從80C196KC的輸出管腳輸出的信號電流只有幾個μA,不足以驅動后邊的光電耦合器,所以加一個TTL芯片5407作為電流驅動元件。MOC3061是常用的雙向晶閘管輸出的光電耦合器,他的輸出端是光敏雙向晶閘管,當光電耦合器的輸入端有15 mA電流流入時,晶閘管即導通。MOC3061的輸出端還配有過零檢測電路,用于控制晶閘管過零觸發,以減少用電器在接通時對電網的影響。
2 軟件設計
系統的軟件采用了高級語言PL/M-96嵌入匯編語言編寫,采用模塊化結構設計。對于實時性要求較高的部分如A/D轉換部分,由于匯編語言具有靈活性好、代碼轉換速度快等特點,同時80C196KC的指令系統效率高,執行速度快,因此采用匯編語言來編寫A/D轉換程序,其他部分采用高級語言編寫,程序可讀性好。
整個軟件共包括7部分,他們分別是:主程序、A/D轉換子程序、投切子程序、電壓投切子程序、電流計算子程序、輸出子程序、軟件定時器中斷服務程序。下面介紹主程序及A/D轉換子程序的設計。
2.1 主程序設計
主程序流程圖如圖5所示。

2.2 A/D轉換子程序
數據采樣是通過A/D轉換與軟件定時器的中斷服務程序相結合完成的。每個周期測量開始由主程序確定模擬通道;用軟件定時器定時,然后啟動A/D轉換。軟件定時器定時時間到進入軟件定時器中斷服務程序,由軟件定時器中斷服務程序中返回主程序完成一個周期的采樣過程。
A/D轉換子程序流程圖如圖6所示。

系統中軟件定時器中斷子程序是采用高級語言PL/M語言來編寫的,附程序如下:
定時20 ms程序:
hso_command=18h;/*采用軟件定時器0,中斷方式*/
hso_time=timer1+15000; /*定時20 ms*/
3 結 語
本文介紹的電力補償器是一種無功功率自動跟蹤補償裝置,他采用微機控制器跟蹤負載無功電流的變化,由大功率晶閘管電路對多級電容器組進行自動投切,對線路無功功率進行實時補償。該補償器無觸點、不發熱、小沖擊、過零投切、安全可靠、免維護。控制部分采用了80C196KC單片機為核心的控制器,實現了自動補償、無人值守。他解決了以往有觸點投切工作不可靠、故障率高、維護量大、使用壽命短等特點。
參考文獻
[1] 伯根A R.電力系統分析[M].劉康立譯.北京:曉園出版社,1985.
[2] 孫涵芳.Intel16位單片機[M].北京:北京航空航天大學出版社,2001.
[3] 喻方平,羅微.MCS-96系列單片機PL/M語言編程及系統的設計與調試[M].北京:電子工業出版社,1997.










評論