智能車黑線識別算法及控制策略研究


其中,MVn、MVn-1;當前和上次操作量;△MVn:當前操作量微分;en、en-1、en-2:當前,上次,上上次偏差;KP、Ki、Kd的數值通過實驗得到。
經過測試發現,對于舵機控制當它的積分環節ki為O時,小車的表現性能要更好,所以對舵機采用的是帶非線性的PD算法。
該算法首先需要知道所采集圖像中黑線的轉彎斜率(如圖4所示),圖中直線表示賽道為直道,左右兩邊的線分別表示左轉彎和右轉彎時攝像頭可能采集到的黑線情形,不同的線表示不同的轉彎斜率(slope),在后面的PD控制中我們將用到此斜率。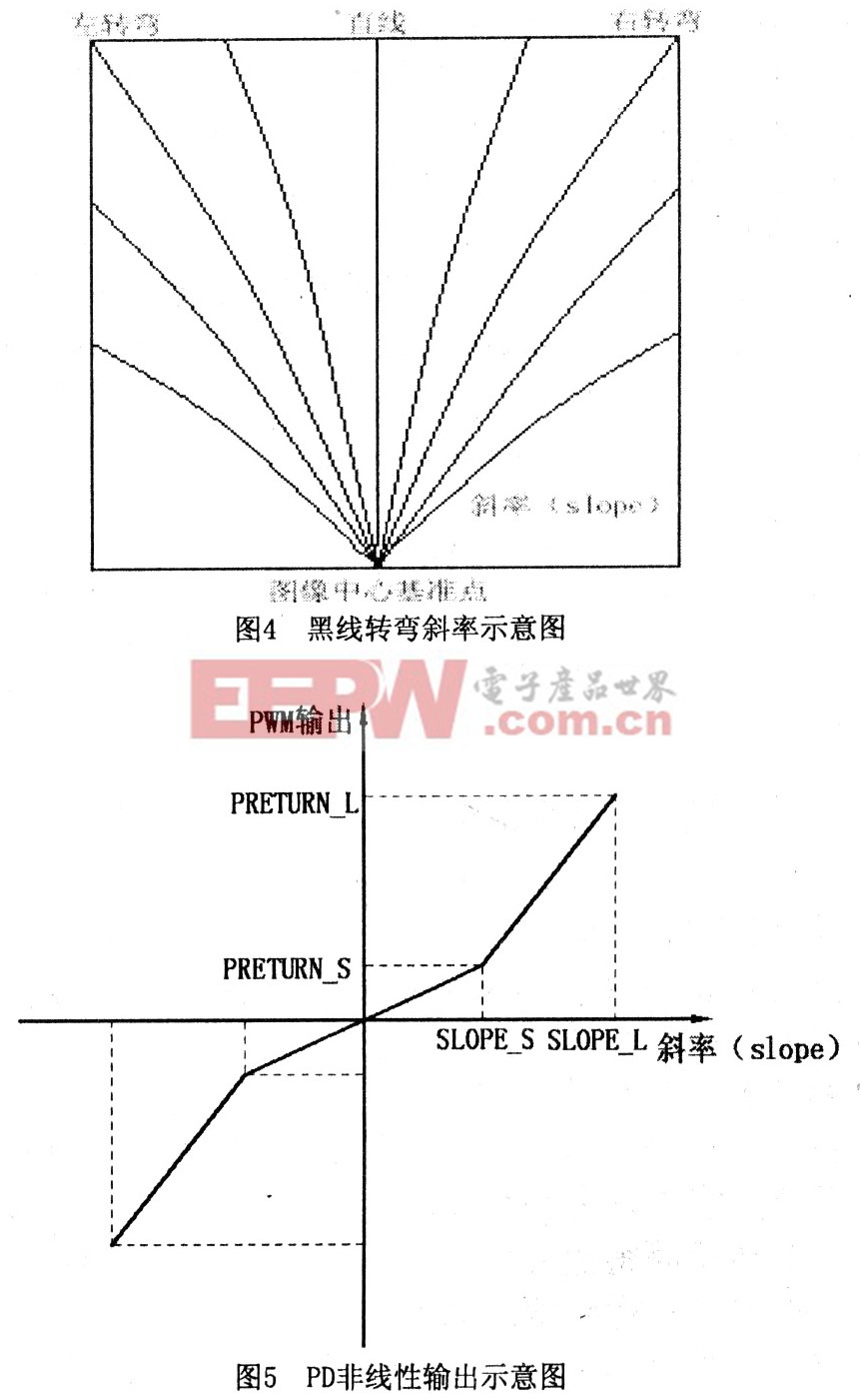
采用的是帶有預判的控制策略(如圖5所示),具體分為以下幾種情況:
(1)賽道一直為直道時,程序如下:

其中,STEER_CENTER為舵機轉向中心,g_lOldPwm為前一步的PWM輸出,g_sCurE為當前的轉彎偏差,g_soldE為前一步的轉彎偏差。
4 結論
本文在攝像頭已經能夠采集較為準確圖像的基礎上,提出并研究了黑色指引線的邊緣提取算法,然后在該算法的基礎上決定了舵機轉向的控制策略,通過實踐證明,采用此種算法和控制策略可以使賽車獲得較快的行駛速度和較為可靠的轉向性能。












評論