基于單片機的電動車無線遙控系統設計

本系統以單片機AT89C51 為電動車的控制核心, 利用紅外遙控器配以紅外接收頭及直流電機的正反轉控制電路來實現電動車的運動控制。系統由紅外線遙控器, 紅外線接收模塊, 電動機驅動模塊, 顯示及聲光指示模塊, 方向控制模塊等幾部分組成。系統流程如圖1, 原理框圖如圖2.
本文引用地址:http://www.czjhyjcfj.com/article/172416.htm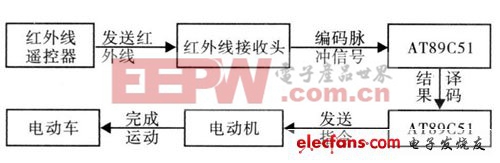
圖1 原理流程圖
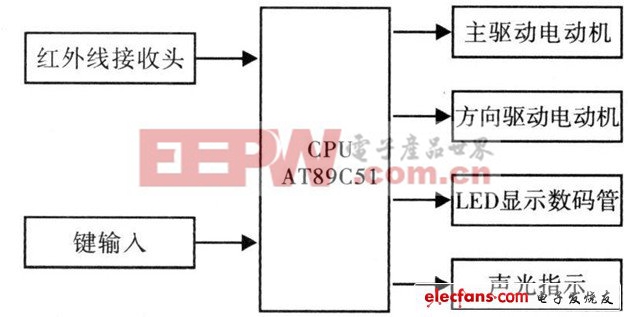
圖2 系統框圖
1 紅外遙控系統
通用紅外遙控系統由發射和接收兩大部分組成, 應用編/ 解碼專用集成電路芯片來進行控制操作, 如圖3 所示。發射部分包括鍵盤矩陣、編碼調制、LED 紅外發送器; 接收部分包括光、電轉換放大器、解調、解碼電路。

圖3 紅外遙控系統框圖
1. 1 遙控發射器及編碼
當發射器按鍵按下后, 即有遙控碼發出, 所按的鍵不同遙控編碼也不同。這種遙控碼具有以下特征:
采用脈寬調制的串行碼, 以脈寬為0. 565 ms、間隔0. 56 ms、周期為1. 125 ms 的組合表示二進制的0; 以脈寬為0. 565 ms、間隔1. 685 ms、周期為2. 25 ms 的組合表示二進制的 1 , 其波形如圖4 所示:
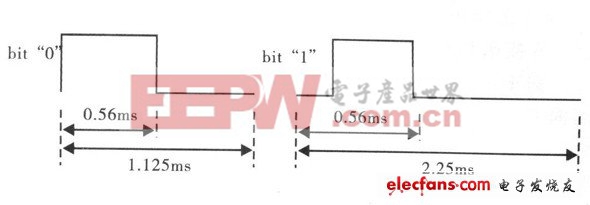
圖4 遙控編碼的0和1
上述 0和1組成的32 位二進制碼經38 kH 的載頻進行二次調制以提高發射效率, 達到降低電源功耗的目的。然后再通過紅外發射二極管產生紅外線向空間發射。
1. 2 接收器及解碼
解碼的關鍵是如何識別0和1 , 從位的定義我們可以發現 0 、1均以0. 56 ms 的低電平開始, 不同的是高電平的寬度不同,0為0. 56 ms, 1為1. 68 ms, 所以必須根據高電平的寬度區別0和 1 .如果從0. 56 ms 低電平過后, 開始延時, 0. 56 ms 以后, 若讀到的電平為低, 說明該位為0 , 反之則為1 , 為了可靠起見, 延時必須比0. 56 ms 長些, 但又不能超過1. 12 ms, 否則如果該位為0 , 讀到的已是下一位的高電平, 因此取( 1. 12 ms+ 0. 56 ms) / 2= 0. 84 ms 最為可靠, 一般取0. 84 ms 左右均可。
根據碼的格式, 應該等待9 ms 的起始碼和4. 5 ms 的結果碼完成后才能讀碼。

電度表相關文章:電度表原理
紅外遙控器相關文章:紅外遙控器原理











評論