MCS-51單片機與二線制串行E2PROM的接口方法

二線制串行E2PROM是一種非易失存儲器,以其體積小、功耗低、操作靈活、性價比高、存儲數據可靠等諸多優點,是單片機應用系統中非易失存儲器的理想選擇。但二線制串行E2PROM的操作采用I2C總線協議,而MCS-51系列單片機沒有I2C接口,我們在研制“GLM-500測濕儀”時,利用MCS-51單片機的兩條I/O線,通過軟件產生I2C總線所要求的操作時序,可方便地實現MCS-51對二線制串行E2PROM的讀寫操作。
本文引用地址:http://www.czjhyjcfj.com/article/172168.htm1 二線制串行E2PROM的引腳功能及基本操作時序
圖1是二線制串行E2PROM 24C01/02/04/08/16的引腳排列圖。
僅SCL和SDA端為基本的總線操作端;SCL是串行時鐘輸入端;SDA是串行數據輸入/輸出端;漏極開路輸出需接上拉電阻到VDD;WP是寫保護端,接高電平時,只能讀出,禁止寫入;A0、A1、A2是片選端,對于24C01/02/04/08/16,內部無連接,可接至VSS。
I2C總線協議運用主/從雙向通訊。發送數據到總線上的器件定義為發送器,接收數據的器件定義為接收器。主器件和從器件都可工作于接收器和發送器狀態,但總線必須由主器件(通常為微處理器)控制,主器件產生串行時鐘(SCL),控制總線上數據傳送的方向,并產生開始和停止信號。
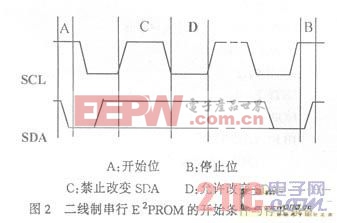
總線從主器件產生開始條件后到產生停止條件期間有效,微處理器對串行E2PROM的讀寫操作在開始位控制下開始,在停止位控制下結束。
當SCL和SDA均為高電平時,定義為總線空閑狀態,數據的傳送必須在總線空閑時才能開始。當SCL為高電平時,SDA由高到低的變化為傳送數據的開始位;而當SCL為高電平時,SDA由低到高的變化為停止位。在開始條件以后,SDA上數據的改變必須在SCL為低電平期間進行,在SCL為高電平期間, SDA必須保持穩定。每傳送一位數據,主器件必須發出一個時鐘脈沖。開始與停止條件如圖2所示。
一次讀操作讀出的字節數由主器件決定,沒有限制,多到一次可以讀出整個存儲器的內容;而對于寫操作,一次最多可以寫入一個頁面的字節數,如果超過了節),則前面接收到的數據將被覆蓋。
數據傳送過程中,每接收一個數據,接收器必須產生一個低電平的確認信號,主器件必須產生一個與此確認位相應的時鐘脈沖。
開始位以后,主器件需送出8位的控制字節,其格式請參考有關的文獻。
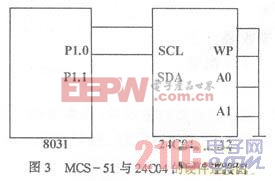
MCS-51系列單片機由于沒有I2C總線接口,可利用兩條I/O線P1.0和P1.1分別連至串行E2PROM的SCL和SDA端,通過軟件產生E2PROM所要求的讀寫時序,MCS-51系列單片機與24C04的硬件連接如圖3所示。
3 讀寫程序
MCS-51系列單片機對二線制串行E2PROM讀寫時,必須產生開始位,發送控制字節,控制數據傳送,產生停止位。按照圖3的連接,MCS-51系列單片機對24C04的讀寫程序如下:
①字節讀子程序
入口條件:R0中存放塊內寫入單元的地址;R1中存放待寫入的數據;R2中存放控制字節。
BYWR:SETBP1.0 ;產生開始位
CLRP1.1
CLRP1.0
MOV A,R2 ;發送控制字節
LCALLSBWR
SETBP1.1
SETBP1.0
NOP
JBP1.1,BYWR
;判有無確認信號,接收器沒確認重新開始
CLRP1.0
MOV A,R0 ;發送塊內寫入字節地址
LCALLSBWR
SETBP1.1
SETBP1.0
JBP1.1,$ ;判確認信號
CLRP1.0
MOV A,R1 ;發送寫入數據
LCALLSBWR
SETBP1.1
SETBP1.0
JBP1.1,$ ;判確認信號
CLRP1.0
CLRP1.1 ;產生停止位
SETBP1.0
SETBP1.1
CLRP1.0
RET
②字節寫子程序
入口條件:R0中存放塊內讀出字節的地址;R2中存放控制字節,其最低位為0。
返回結果:讀出的數據存于R1中。
BYRD:SETBP1.0 ;產生開始位
CLR P1.1
CLR P1.0
MOV A,R2 ;發送控制字節
LCALLSBWR
SETBP1.1
SETBP1.0
NOP
JBP1.1,BYRD
;判確認信號,接收器未確認重新開始
CLR P1.0
MOV A,R0 ;發送塊內讀出字節地址
LCALLSBWR
SETBP1.1
SETBP1.0
nbs

51單片機相關文章:51單片機教程











評論