基于機器視覺的智能導覽機器人控制系統設計

1 引言
移動機器人是機器人學一個重要分支,且隨著相關技術的迅速發展,它正向著智能化和多樣化方向發展,應用廣泛,幾乎滲透所有領域。于春和采用激光雷達的方式檢測道路邊界,效果較好,但干擾信號很強時,就會影響檢測效果。付夢印等提出以踢腳線為參考目標的導航方法,可提高視覺導航的實時性。
這里采用視覺導航方式,機器人在基于結構化道路的環境下實現道路跟蹤,目標點的停靠,以及導游解說,并取得較好的效果。
2 導覽機器人簡介
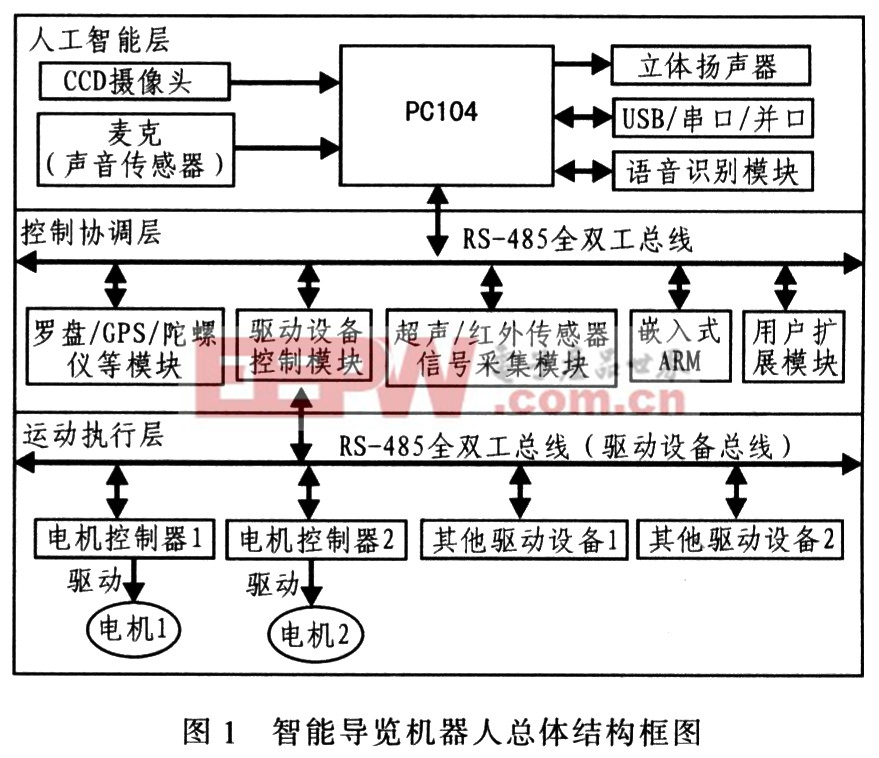
導覽機器人用在大型展覽館、博物館或其他會展中心,引導參訪者沿著固定路線參訪,向參訪者解說以及進行簡單對話。因此導覽機器人必須具有自主導航、路徑規劃、智能避障、目標點的停靠與定位、語音解說以及能與參訪者進行簡單對話等功能,并具有對外界環境快速反應和自適應能力。基于層次結構,導覽機器人可分為:人工智能層、控制協調層和運動執行層。其中人工智能層主要利用CCD攝像頭規劃和自主導航機器人的路徑,控制層協調完成多傳感信息的融合,而運動執行層完成機器人行走。圖1為智能導覽機器人的總體結構框圖。
3 導覽機器人硬件設計
3.1 人工智能層硬件實現
考慮到移動機器人控制系統要求處理速度快、方便外圍設備擴展、體積和質量小等要求,因此上位機選用PC104系統,其軟件用C語言編程。采用USB攝像頭,采集機器人前方的視覺信息,為機器人視覺導航,路徑規劃提供依據。外設麥克和揚聲器,當機器人到達目標點后,進行導覽解說。
3.1.1 控制協調層的硬件實現
機器人傳感器的選取應取決于機器人的工作需要和應用特點。這里選用超聲波傳感器、紅外傳感器、電子羅盤及陀螺儀,采集機器人周圍環境信息,為機器人避障、路徑規劃提供幫助。利用ARM處理平臺,通過RS-485總線驅動電機,驅動機器人行走。











評論