基于機器視覺的智能導覽機器人控制系統設計

設f(x,y)為MxN的源圖像,g(s,t)為SxT(s≤M,T≤N)的模板圖像,則誤差平方和測度定義為:本文引用地址:http://www.czjhyjcfj.com/article/163518.htm
當A為常數時,則可用2B相匹配,當D(x,y)取得最大值時,便認為模板與圖像相匹配。通常假設A為常數時會產生誤差。嚴重時將無法正確匹配,因此可用歸一化互相關作為誤差平方和測度,定義為:
4.3 模板匹配改進算法
但是按模板匹配算法求匹配計算工作量非常大,考慮到相關是卷積的一種特定形式以及 Matlab計算功能的強大,采用FFT方法,在頻域中計算后再進行逆變換即可求出。圖像和定位模板圖像旋轉180°的傅里葉變換后作點乘運算,再求其逆 FFT變換并返回空間域值也就相當于相關運算。在求取空間域值的最大值后,再根據最大值選取合適的閾值,便可確定目標點的位置。實驗中在模板匹配成功后,可將目標和背景顏色二值化,并用紅色“十”字符號標記,不斷更新數據信息。將停靠點設定在自己期望的像素位置(如圖像的中心位置偏下),然后自動調整機器人位置,設計成如圖5形式,可知機器人需要向右行駛。
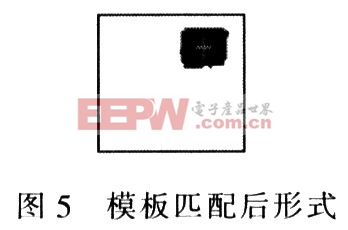
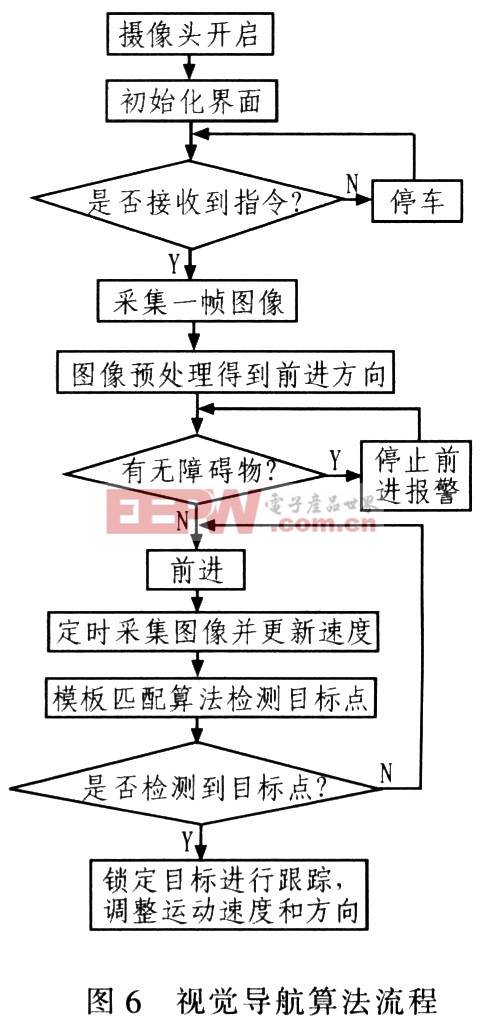
圖6為視覺導航算法流程。
5 實驗結果與結論
基于以上設計,對進行機器人運動控制和路徑規劃進行實驗。實驗分別采用Matlab語言進行圖像仿真,能夠自動選擇合適的閾值分割,并得到較好的邊緣檢測,然而在實驗中有時會因為光照強度或其他因素影響,在進行閾值分割時不能達到理想效果,在 VC環境下能夠控制機器人運動,模板匹配取得較好效果,后續將著重在Visual C++6.0環境進行圖像處理方法研究。這樣可以更好控制機器人運動。總之,該系統設計可使機器人能夠在復雜多變的環境下準確識別圖像信息,并做出正確決策,完成所需動作,從而實現既定目標。











評論