排爆機(jī)器人控制與無線通訊系統(tǒng)

引言
本文引用地址:http://www.czjhyjcfj.com/article/152491.htm排爆機(jī)器人屬于搬運(yùn)機(jī)器人的一種類型,很多搬運(yùn)機(jī)器人是模仿人類的動(dòng)作,用來幫助或部分代替人來進(jìn)行繁重、危險(xiǎn)、重復(fù)等工作。排爆機(jī)器人模仿人類的行走、抓取物體的動(dòng)作,可以被用來排除現(xiàn)場(chǎng)的爆炸物。排爆機(jī)器人機(jī)械部分包含行走小車和機(jī)械手臂。
1 排爆機(jī)器人控制系統(tǒng)結(jié)構(gòu)
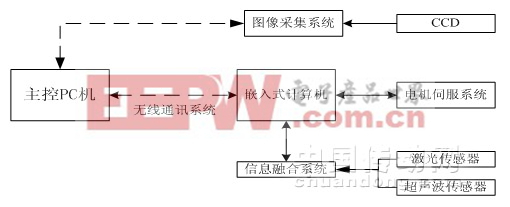
排爆機(jī)器人控制系統(tǒng)不再采用原來機(jī)器人所采用的PLC控制方式,而是基于嵌入式工控機(jī)的基礎(chǔ)上,采用基于Linux平臺(tái)的開放式構(gòu)件庫(kù),運(yùn)算速度極快,可以達(dá)到微秒級(jí)。排爆機(jī)器人控制系統(tǒng)由三部分組成,即傳感器部分、機(jī)器人本體、操作控制臺(tái)組成。傳感器部分包含寬接入、多信息融合器。寬接入、多信息融合基于ARM9系統(tǒng),由12位精度以上A/D、32路I/O、RS232通訊接口組成,能融合多種傳感器信號(hào);機(jī)器人本體包含嵌入式控制計(jì)算機(jī)和各關(guān)節(jié)伺服電機(jī),能驅(qū)動(dòng)各軸(帶補(bǔ)償),分配各軸運(yùn)動(dòng),處理和控制各種狀態(tài)量;操作控制臺(tái)部分包含主控PC機(jī)、指令解碼器、圖像解碼器、無線接收發(fā)射器等。CCD攝像機(jī)和超聲波傳感器所獲得的圖像信息、障礙物信息,經(jīng)無線傳輸至主控PC機(jī)。主控PC機(jī)使用圖像識(shí)別和分析技術(shù)獲得對(duì)象物體的形狀和位置信息,同時(shí)將目標(biāo)物、障礙物等三維圖像信息顯示在計(jì)算機(jī)屏幕上。在人工指明目標(biāo)物后,主控PC機(jī)經(jīng)人工智能(模式識(shí)別、路徑規(guī)劃、軌跡避碰等)計(jì)算;將控制指令通過無線傳輸給機(jī)器人本體嵌入式控制計(jì)算機(jī),自動(dòng)控制機(jī)器人運(yùn)動(dòng)。基本結(jié)構(gòu)如圖1所示:
2 小車的行走控制
人工通過控制桿(或按鈕),在小車引導(dǎo)圖像(可視信號(hào))的指示下,完成前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)和原地旋轉(zhuǎn)的功能直至達(dá)到機(jī)械手的手爪能抓取可疑爆炸物的位置為止。機(jī)器人的平衡是利用整機(jī)的動(dòng)力學(xué)算法求得,將求得多種數(shù)據(jù)去控制機(jī)器人手臂的空間姿態(tài)從而達(dá)到整機(jī)平衡而不至于倒覆。例如當(dāng)小車在斜坡作上升運(yùn)動(dòng)時(shí),機(jī)器人手臂往前靠以保持整機(jī)的平衡。小車在運(yùn)動(dòng)過程中需要避開可能遇到的障礙物。通過環(huán)境傳感器如CCD攝像、超聲波傳感器等取得障礙物大小及環(huán)境信息,實(shí)現(xiàn)小車避障,即所謂的路徑規(guī)劃(如圖2所示)

圖2 排爆機(jī)器人路徑規(guī)劃示意圖
3 機(jī)械手的運(yùn)動(dòng)控制
機(jī)械手的運(yùn)動(dòng)控制(如圖3)是多級(jí)控制系統(tǒng):位于最上層的AI級(jí)是人工智能層。它是利用CCD攝像機(jī)和超聲波等傳感器獲得障礙物輪廓與距離以避開障礙物實(shí)現(xiàn)避碰,這就是“軌跡規(guī)劃”(如圖4)。
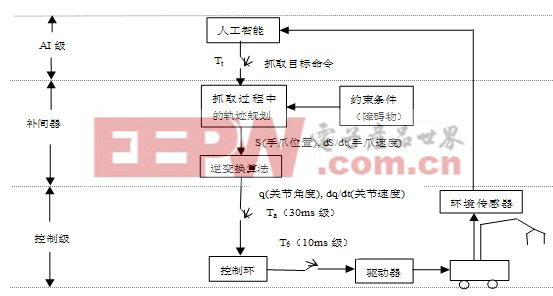
圖3 機(jī)械手多級(jí)運(yùn)動(dòng)控制系統(tǒng)
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂)










評(píng)論