雷達傳感器和紅外傳感器的區別

雷達傳感器和紅外傳感器都可以進行測距,能夠輔助設備進行“感知世界”的行為,雖然說功能看起來是一樣的,但是實現的方式卻是大有不同,紅外測距是通過發射紅外線,雷達測距是通過發射電磁波,從本質上來說是完全不同的兩種實現方式,下面小編帶大家一起了解雷達傳感器和紅外傳感器的區別。

雷達傳感器的工作原理:以WT4101A-C01雷達傳感器為例,這款雷達傳感器是通過發射電磁波信號,然后根據反射回來的電磁波,計算物體的大小和方向,即便是霧天、雨天、或一些障礙物也可以穿透,它他也可以精準識別,不容易受外界環境影響。
WT4101A-C01:抗環境干擾能力強,不受溫度、濕度、氣流、灰塵、噪聲、亮暗等影響。穿透性強,可穿透亞克力、玻璃及薄的非金屬材料。內置 MCU,內嵌多重數字濾波算法,集成 50Hz/60Hz 工頻干擾濾除算法和 WiFi等其他無線通信干擾算法,具有更高的抗擾度。
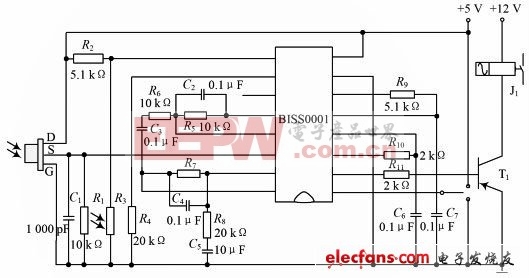
紅外測距傳感:紅外測距傳感器的工作原理是基于光學反射原理,通過發射特定波長的紅外線,紅外線接觸目標物體后反射,由接收管捕捉反射信號。傳感器通過發射和接受紅外線的時間差或者反射光強度進行計算。
以WTU201F2 B004低功耗紅外測距模塊為例,這款紅外模塊適用于室內物體探測應用,當物體進入探測范圍時,紅外反射能量會發生變化,可以通過探測反射的變化來判斷距離。
與市場上通用的紅外感應模塊相比,這個模塊體積小,物體檢測距離可達100cm;而且具很低的待機功耗(≤12uA)。最大工作電壓5.5V,最低工作電壓3.3V,增加了本產品不同的應用環境,滿足不同電源設計產品的需求。模塊化設計,縮減產品開發時間,提供I/O和UART串口兩種通訊方式,供用戶選擇,可快速調整各模塊的特性,達到快速、方便開發的優勢。具有超高的穩定性,可為客戶提供適用于各種場景的靈活使用。
一、測量范圍和測量精度的區別:
紅外傳感器多用在室內,以中短距離為主,絕大多數測量范圍都在0.1m-10m,少數工業級的產品能夠做到50米。測量精度:越遠精度越差,而且會收到目標角度的影響。
雷達傳感器的測量范圍就很遠了,中長距離的優勢十分明顯,且不容易收到外界環境的干擾,普通型號都可以做到百米以上,汽車雷達可以做到500米以上。測量精度:中遠距離精度更穩定,對目標角度尺寸容忍度更高。

二:環境適用性對比
紅外測距傳感器:對目標顏色敏感(黑色吸收紅外線,反射率低,易漏檢;白色反射率高,檢測更準);無法區分靜止 / 運動目標(僅部分帶多普勒功能的紅外傳感器可實現)適合室內使用。
雷達測距傳感器:對目標顏色、反光率無要求(金屬、塑料、布料均可檢測);通過多普勒效應可輕松區分靜止 / 運動目標,并計算目標移動速度(如汽車雷達檢測前車速度)。適合室外使用。
三、功耗與成本區別
紅外測距傳感器功耗低(多數為 mA 級電流),成本低,體積小可集成至微型設備。
雷達測距傳感器功耗較高(射頻模塊需幾十至幾百 mA 電流),成本要看具體的產品需求,以汽車雷達為例可高達數千元。
簡單來說,如果您需要一個在干凈房間里工作的“眼睛”,選紅外性價比高。如果您需要一個能在暴風雨中工作的“感知器官”,雷達是唯一的選擇。
更多詳情可搜索:深圳唯創知音(www.wtchip.com)與在線客服溝通,申請免費樣品測試~
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。


.jpg)