關于智能車模起跑線識別方法的設計與實現
—— Scratch Line Identification Method Design and Realization for Intelligent Smart-Car Model

引言
本文引用地址:http://www.czjhyjcfj.com/article/95520.htm本設計基于“飛思卡爾”杯(Freescale)全國大學生智能車模競賽[1],提出車模的記憶路況算法中的起跑線識別設計。車模的行進速度和穩定性的硬件因素主要取決于巡線傳感器和舵機偏轉速度,軟件因素主要取決于巡線算法。目前采用紅外光電傳感器作為巡線傳感器,舵機的偏轉參數為60°/0.18s,如果在巡線算法上采用路況記憶和分析算法,車模在進入第二圈運行時就可“預知”前方路況,這對提高車速是很有利的。這就需要車模系統能夠識別起跑線,因為起跑線是車模進行記憶和路況分析的標志點,本文就針對識別起跑線問題進行探討。
車模與賽道的相關參數
車模比賽中有許多規定及技術參數,這里列舉一些相關參數,以便后面的敘述與計算。相關參數如圖1所示。
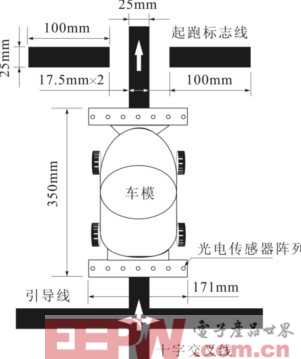
圖1 車模及賽道的相關參數




















評論