基于Taylor展開(kāi)法整定MIC-PID控制器參數(shù)

內(nèi)模控制(IMC)是一種實(shí)用性很強(qiáng)的控制方法,其設(shè)計(jì)簡(jiǎn)單,跟蹤調(diào)節(jié)性能好,特別是對(duì)于魯棒性及抗干擾性的改善和大時(shí)滯系統(tǒng)的控制,效果尤為顯著。經(jīng)過(guò)多年的發(fā)展,IMC方法的應(yīng)用已經(jīng)從線性系統(tǒng)擴(kuò)展到了非線性和多變量系統(tǒng),并產(chǎn)生了多種設(shè)計(jì)方法,如零一極點(diǎn)對(duì)消法,預(yù)測(cè)控制法,針對(duì)PID控制器設(shè)計(jì)的方法等。將IMC引入PID控制器的設(shè)計(jì),既可以得到明確的解析結(jié)果,降低參數(shù)設(shè)計(jì)的復(fù)雜性和隨機(jī)性,又能方便地考慮到系統(tǒng)魯棒性的要求。本文針對(duì)一階不穩(wěn)定時(shí)滯過(guò)程,通過(guò)對(duì)過(guò)程控制系統(tǒng)含有純滯后環(huán)節(jié)的近似處理,介紹了Taylor級(jí)數(shù)在MIC-PID參數(shù)整定中的應(yīng)用,最后利用仿真進(jìn)行了驗(yàn)證。
1 內(nèi)模控制
1)內(nèi)模控制原理
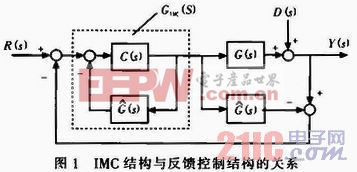
內(nèi)模控制器與簡(jiǎn)單反饋控制結(jié)構(gòu)的關(guān)系,可以用圖1來(lái)表示。
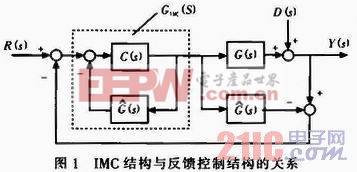
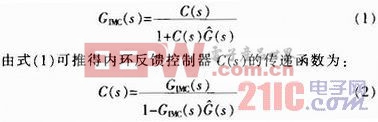
圖中C(s)為反饋控制器,GIMC(s)為內(nèi)模控制器,
2)內(nèi)模控制器的設(shè)計(jì)步驟
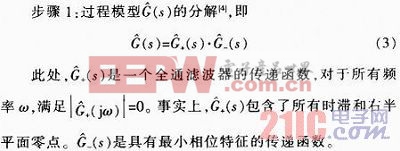
步驟2:IMC控制器設(shè)計(jì)
在設(shè)計(jì)內(nèi)模控制器時(shí),需在最小相位的
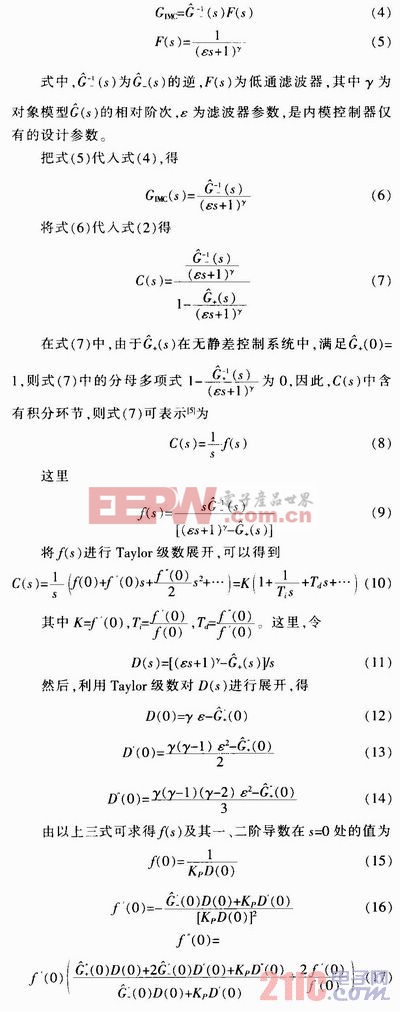
上面的公式可以用來(lái)求取控制器的增益、積分時(shí)間和微分時(shí)間,這些參數(shù)是過(guò)程模型參數(shù)和IMC濾波器時(shí)間常數(shù)的函數(shù)。

pid控制器相關(guān)文章:pid控制器原理



評(píng)論