DIY傳感器讓機器人雙手和雙腳都能感覺到

由于缺乏多功能、可訪問且易于定制的觸覺傳感器,導致通用機器人作中出現了碎片化的、特定于傳感器的解決方案
本文引用地址:http://www.czjhyjcfj.com/article/202506/471608.htm紐約大學的研究人員在 E-flesh 項目中合作,正在彌合無力感知和無傳感器機器人應用與有感知的抓手、手和腳之間的差距。有趣的是,您可以輕松制作自己的傳感器:您需要一臺業余 3D 打印機、小型現成的磁鐵和磁力計電路板。
來自 E-flesh 網站 :
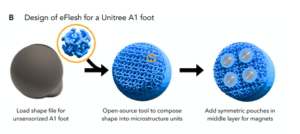
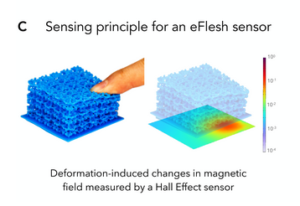
“該傳感器由平鋪、參數化的切割單元微結構構成,允許調整傳感器的幾何形狀和機械響應。為了支持廣泛的可訪問性,我們提供了一個開源設計工具,可將簡單的凸面 OBJ/STL 文件轉換為可 3D 打印的 STL,以便制造。這種模塊化設計框架使用戶能夠為機器人手、夾爪、四足足等創建特定于應用的傳感器,并輕松調整靈敏度以滿足不同任務的需求。
我們的傳感器表征實驗證明了 eFlesh 的精度:接觸定位精度為 0.5 mm,沿 z 軸的力預測誤差為 0.27 N,沿 x/y 平面的力預測誤差為 0.12 N。我們還提出了一個基于學習的滑動檢測模型,該模型以 95% 的準確率推廣到看不見的物體,以及視覺觸覺控制策略,該策略將作性能提高了 40%,在僅視覺基線上提高了 40%——在插頭插入和信用卡刷卡等許多精確任務中實現了 90% 的成功率,這些任務需要亞毫米級的精度才能成功完成。所有設計文件、代碼、經過訓練的模型和 CAD 到 eFlesh STL 轉換工具都是公開提供的,以促進可訪問性并鼓勵廣泛采用。











評論