spi協議時序圖和四種模式實際應用詳解

大家好,我是無際。
本文引用地址:http://www.czjhyjcfj.com/article/202312/454033.htm上個章節我們講解了spi接口定義,今天我們更加深入講解下spi協議時序圖和spi四種模式的用法。
剛開始接觸單片機開發時,最怕就是看時序圖,對于我來說就是奇怪的知識。
特別是SPI和IIC的,以前寫程序都直接復制別人程序,功能實現就行了也沒去研究過數據傳輸的時候時序具體是怎么樣的。
那個時候經驗也不足,網上搜的資料說的都太學術化了,也看不懂。
后面項目做多了,發現最常用到的通信總線無非就是SPI、IIC、USART、CAN、單口通信。
理解也慢慢深刻了,現在去分析時序圖也更加清晰了。
所以,我經常和無際單片機編程的學員灌輸一種理念,先學會用,用多了經驗豐富了再深入就輕松了。
不要在你沒經驗的時候去死磕,否則會付出很多不必要的時間成本。
下面,我們進入主題。
一、spi四種模式詳解
在講時序圖之前,我們先要了解spi的四種模式,不同的模式采集數據的方式不一樣。
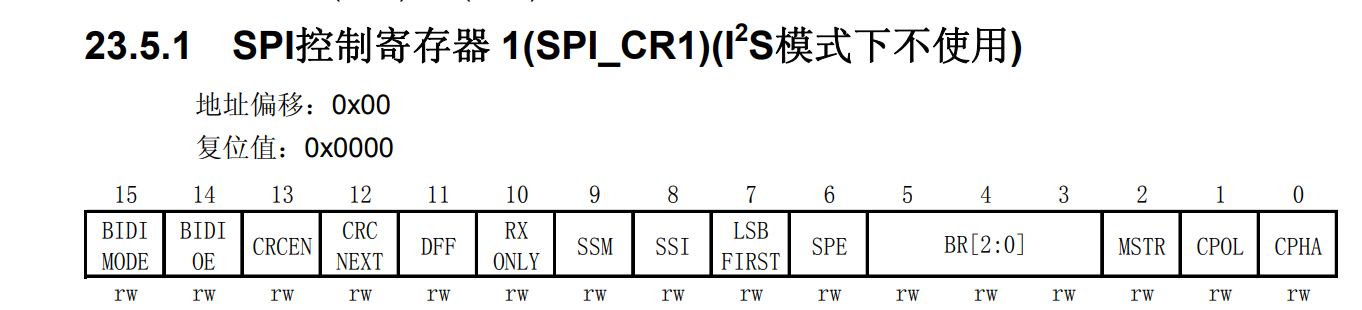
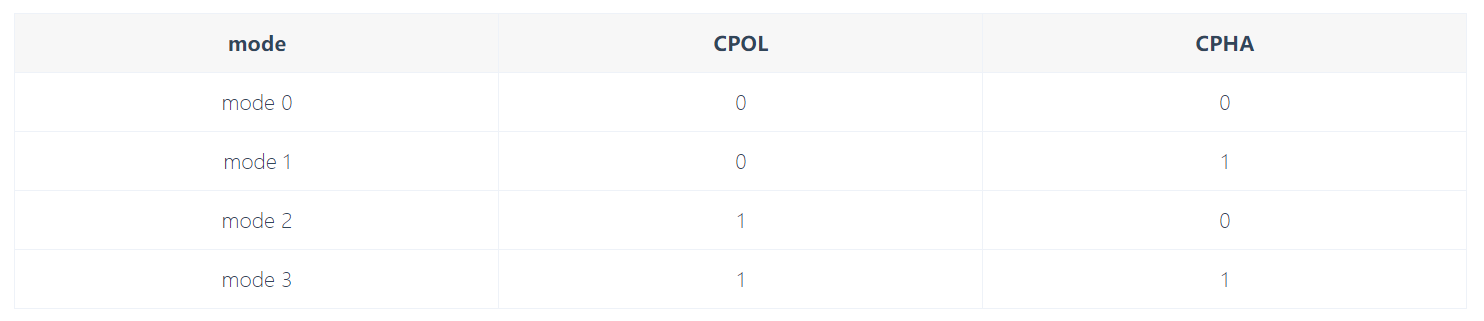
一般內置SPI功能的單片機上,都有兩個寄存器配置位CPOL和CPHA。
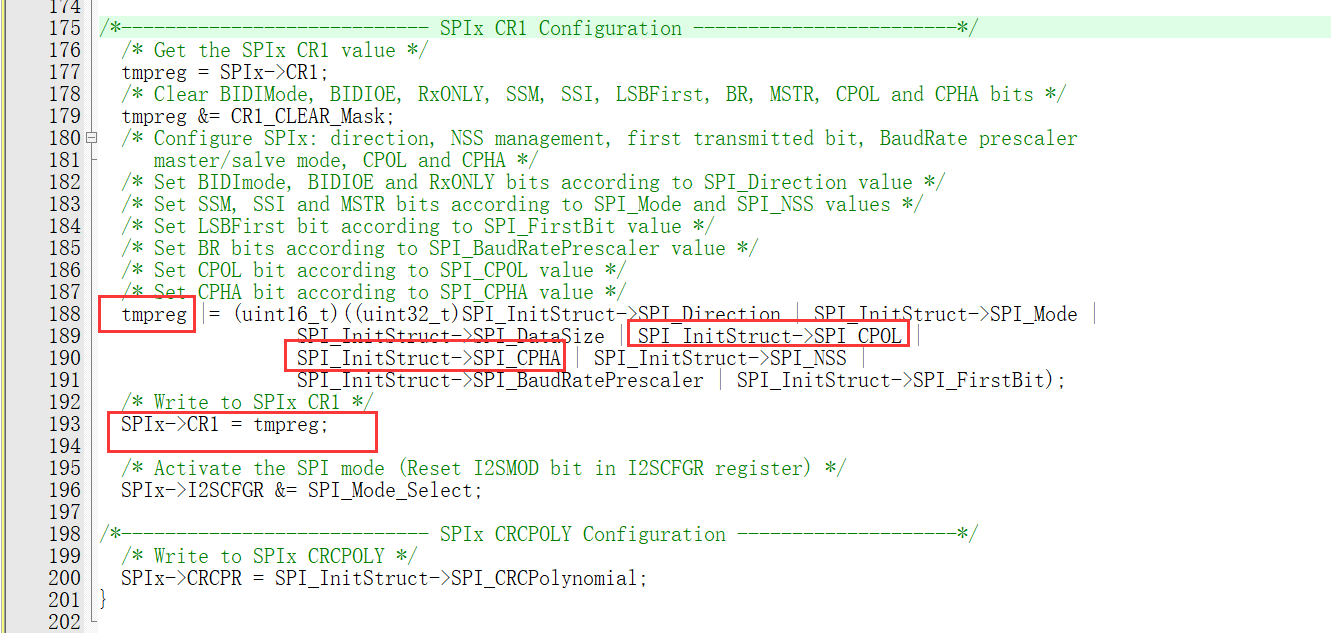
我們拿STM32單片機來舉例,可以通過結構體成員配置。
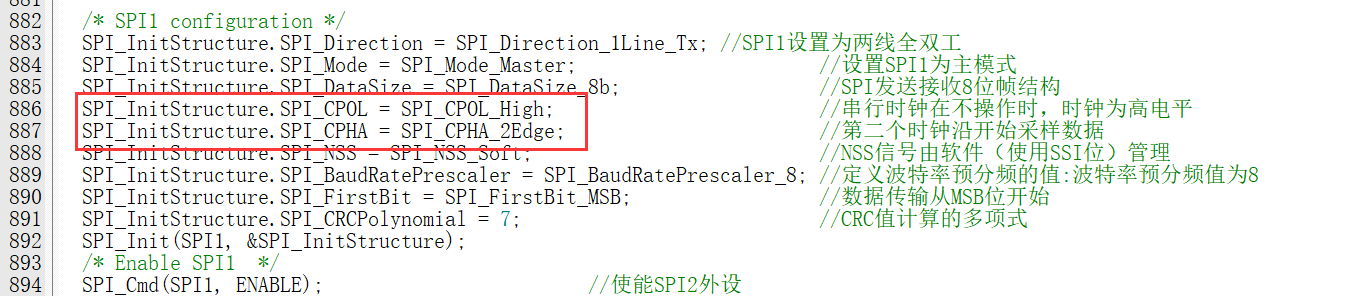
這是通過固件庫直接配置,固件庫底層代碼也是去配置相應寄存器的。

下面來介紹下CPOL和CPHA到底有什么用。
CPOL就是決定SCLK這個時鐘信號線,在沒有數據傳輸的時候的電平狀態。
CPOL=0:空閑狀態時,SCLK保持低電平
CPOL=1:空閑狀態時,SCLK保持高電平

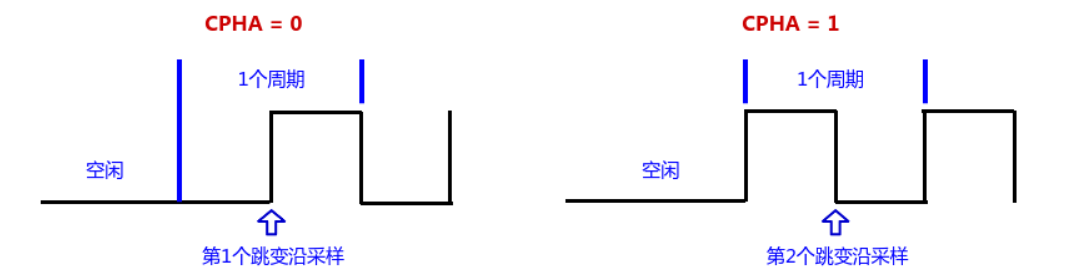
CPHA就是決定數據位傳輸是從第一個時鐘(SCLK)邊沿開始,還是第二個從二個時鐘(SCLK)邊沿開始。
CPHA=0:數據從第一個時鐘(SLCK)邊沿開始采集
CPHA=1:數據從第二個時鐘(SLCK)邊沿開始采集
Ok,理解CPOL和CPHA基本概念以后,下面這兩個要開始”合體”了。
CPOL和CPHA合體就形成了SPI四種模式。
聲明:部分圖片源自網絡,并非原創哈。
下面再分析下4種模式的區別,比較重要。
因為從機,從機指的是使用SPI協議通信的芯片,比如說w25q64(Flash)芯片,OLED屏等等。
很多從機沒有CPOL和CPHA寄存器設置位,如果你看它們數據手冊會一臉懵逼,根本找不到這兩個東西。
這些都是需要看他們時序圖去分析是用什么模式,如果模式不對,數據傳輸會有問題。
這也是為什么明明自己寫了時序用在這個芯片可以,換到別的spi通信的芯片就不行。
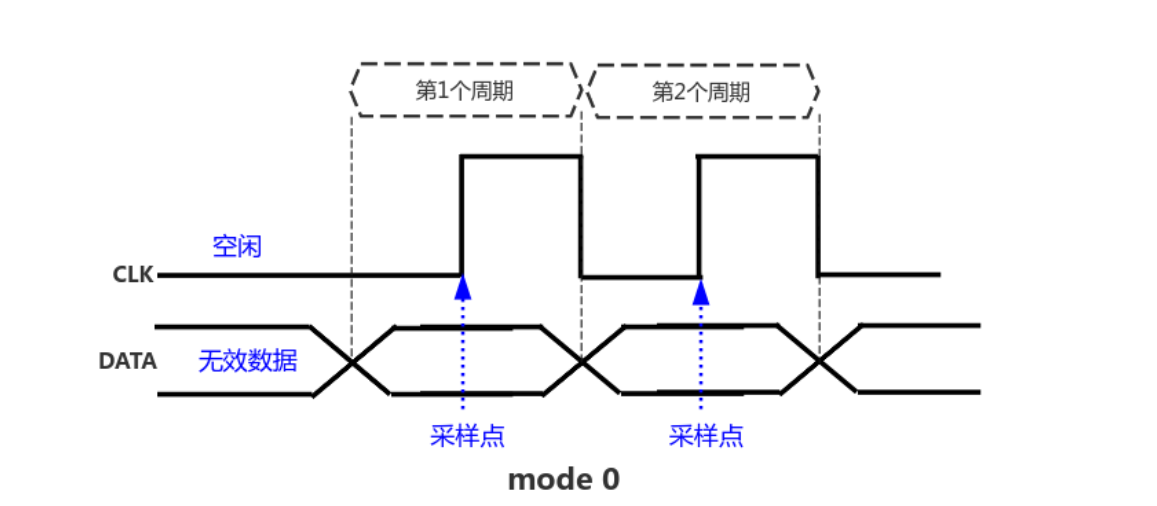
1.模式0(CPOL=0,CPHA=0)
模式0特性:
CPOL = 0:空閑時是低電平,第1個跳變沿是上升沿,第2個跳變沿是下降沿
CPHA = 0:數據在第1個跳變沿(上升沿)采樣
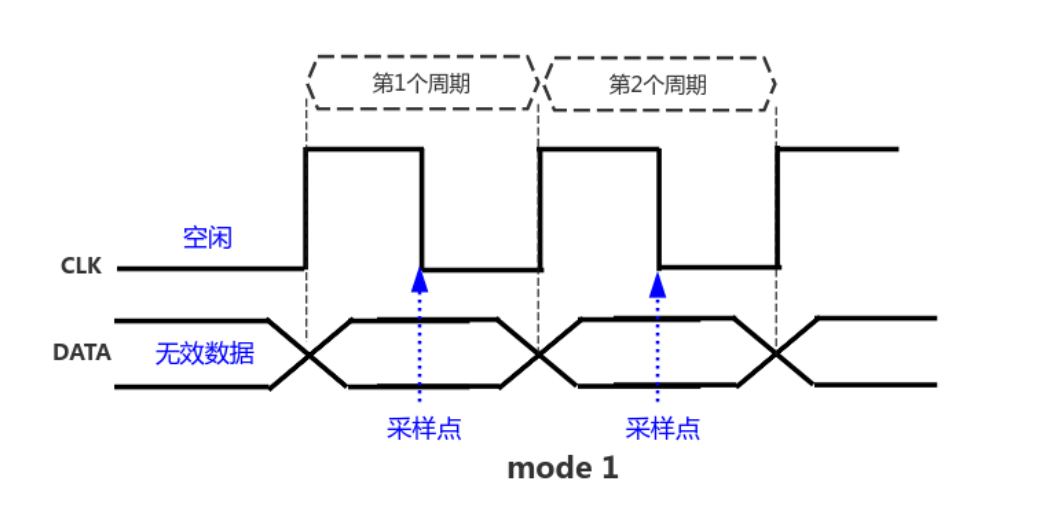
2.模式1(CPOL=0,CPHA=1)
模式1特性:
CPOL = 0:空閑時是低電平,第1個跳變沿是上升沿,第2個跳變沿是下降沿
CPHA = 1:數據在第2個跳變沿(下降沿)采樣
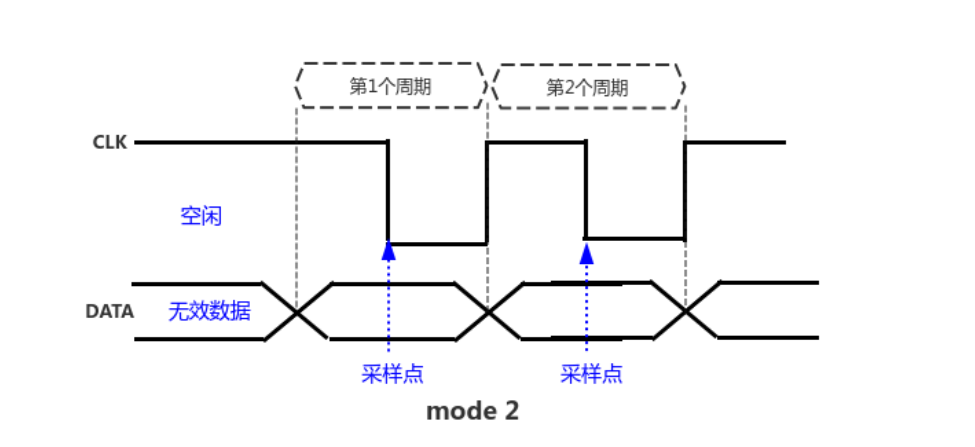
3.模式2(CPOL=1,CPHA=0)
CPOL = 1:空閑時是高電平,第1個跳變沿是下降沿,第2個跳變沿是上升沿
CPHA = 0:數據在第1個跳變沿(下降沿)采樣
4.模式3(CPOL=1,CPHA=1)
CPOL = 1:空閑時是高電平,第1個跳變沿是下降沿,第2個跳變沿是上升沿
CPHA = 1:數據在第2個跳變沿(上升沿)采樣

不知道你有沒有發現,不同的模式,其實就是SCLK空閑時間電平狀態和數據采樣起點不同
你學廢了嗎?當初我就是這幾種模式看得一臉懵逼。
如果不懂,先從開頭繼續看,這4種模式是后面分析整體時序圖的前提。
二、spi時序圖詳解
看到這里恭喜你,你馬上就能徹底攻破SPI協議了。
Spi時序圖,最好的方式就是通過實際應用去學習。
我們拿W25Q64這個Flash芯片舉例,這種芯片在SPI通信里都是作為從機的角色,也就SPI Slave。
一般由單片機或者其它處理器作為主控和它通信,SLCK時鐘也是由主控發出。
下面是W25Q64讀數據指令的時序圖,我們以這個例子來講解下時序圖要怎么看。

1.先確定芯片支持什么SPI哪種模式讀寫數據
確定了用哪種模式,主控,也就是單片機這邊才能確定數據采集的方式,主控和從機要保持一致。
從時序圖中,不難發現,W25Q64的數據手冊直接告訴你支持用SPI模式0和模式3來通信。
有些芯片的數據手冊,是沒有告訴你的,那怎么知道用芯片哪種模式?

第一步:通過時序圖分析CLK空閑時的電平狀態,通過上面那個時序圖,我們可以得知,高低電平都可以對吧?那我們現在先用CLK空閑時是低電平這種狀態繼續往下分析。
第二步:分析DI和DO是在CLK的上升沿還是下降沿采集數據,注意DI代表從機(W25Q64)的MISO引腳,DO代表從機(W25Q64)MOSI引腳。
我們主要通過DI和DO在數據有效區時CLK是上升沿還是下降沿,來判斷
什么是數據有效區?
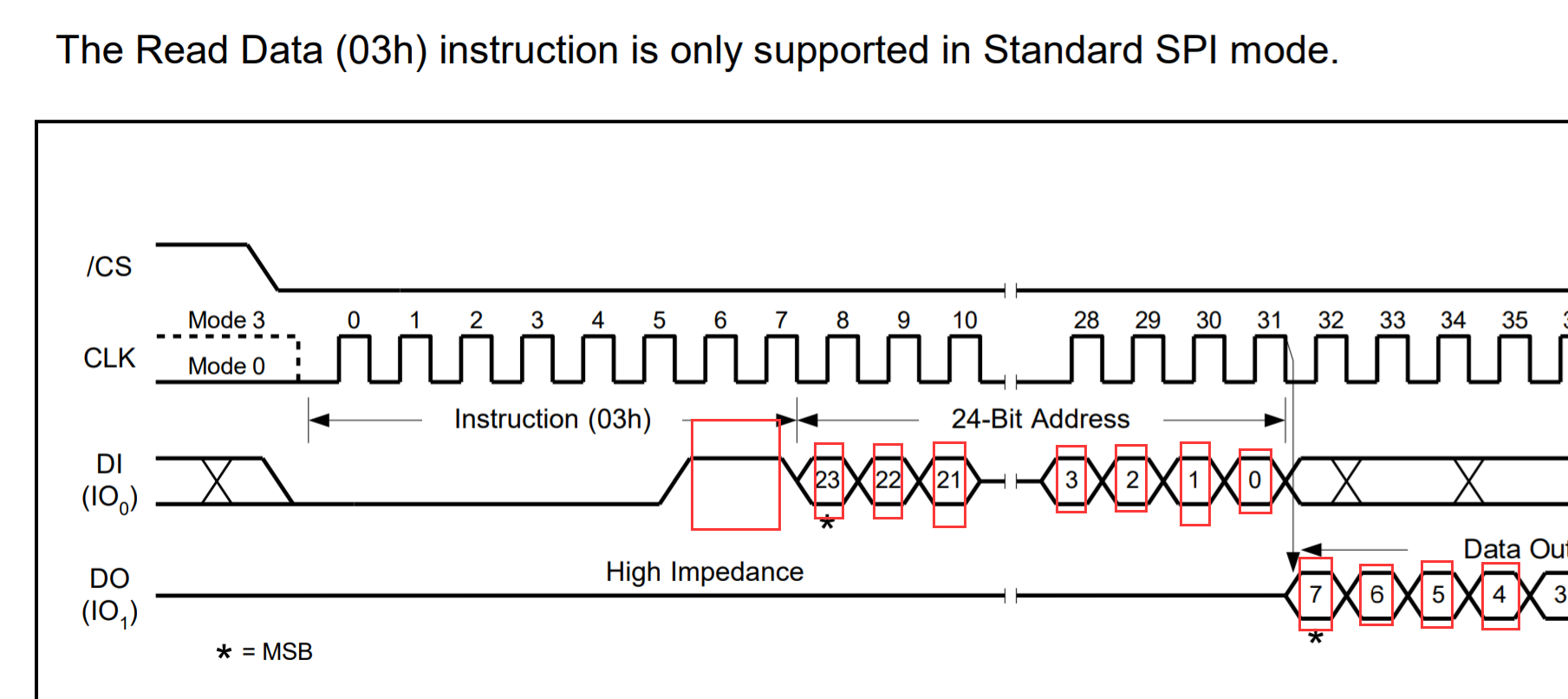
大家看上面這張圖,我用紅色框起來的區域就是數據有效區。
一般數據是通過DI和DO兩個引腳傳輸的,所以數據有效區就是,這一時刻,這兩個引腳的只能是穩定高電平或者低電平。
相當于數據有效區的電平就是最終要傳輸的數據位,低電平代表0,高電平代表1。
傳輸8個位,代表1個字節的數據。
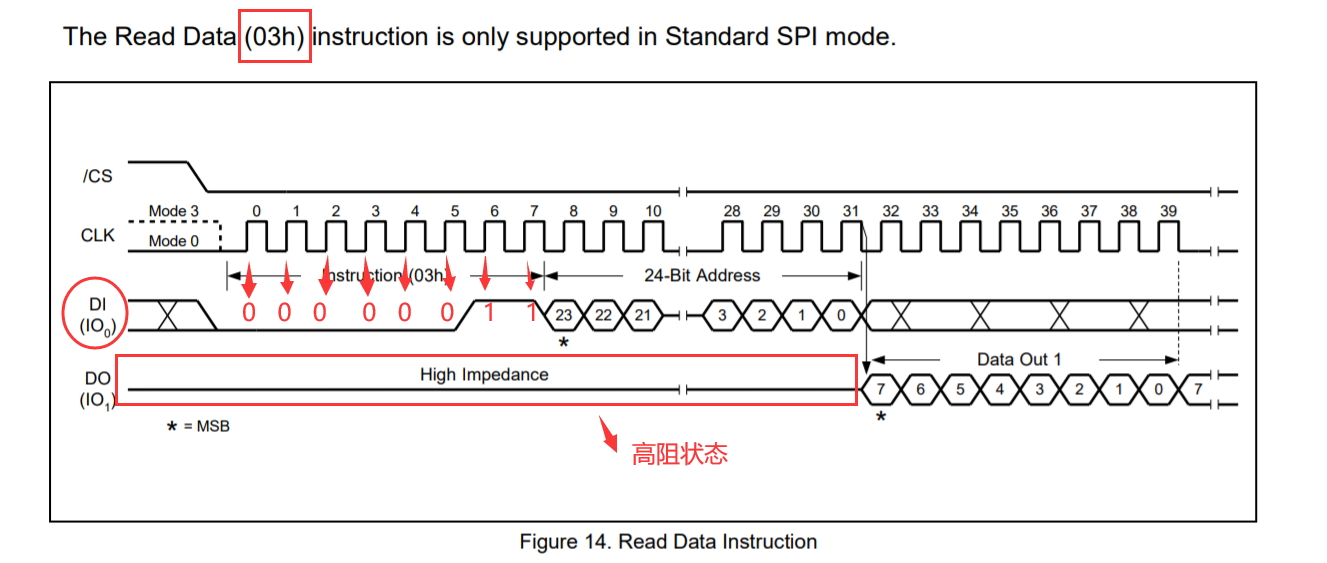
什么是無效數據區?

例如上圖藍色框的區域就是無效數據區,就是這個時刻CLK數據采集時鐘還沒來,所以DI和DO引腳的電平都可以任意變化。
理解了這兩個概念以后,我們重點需要關心是的DI和DO在數據有效區的時候,CLK是上升沿還是下降沿。
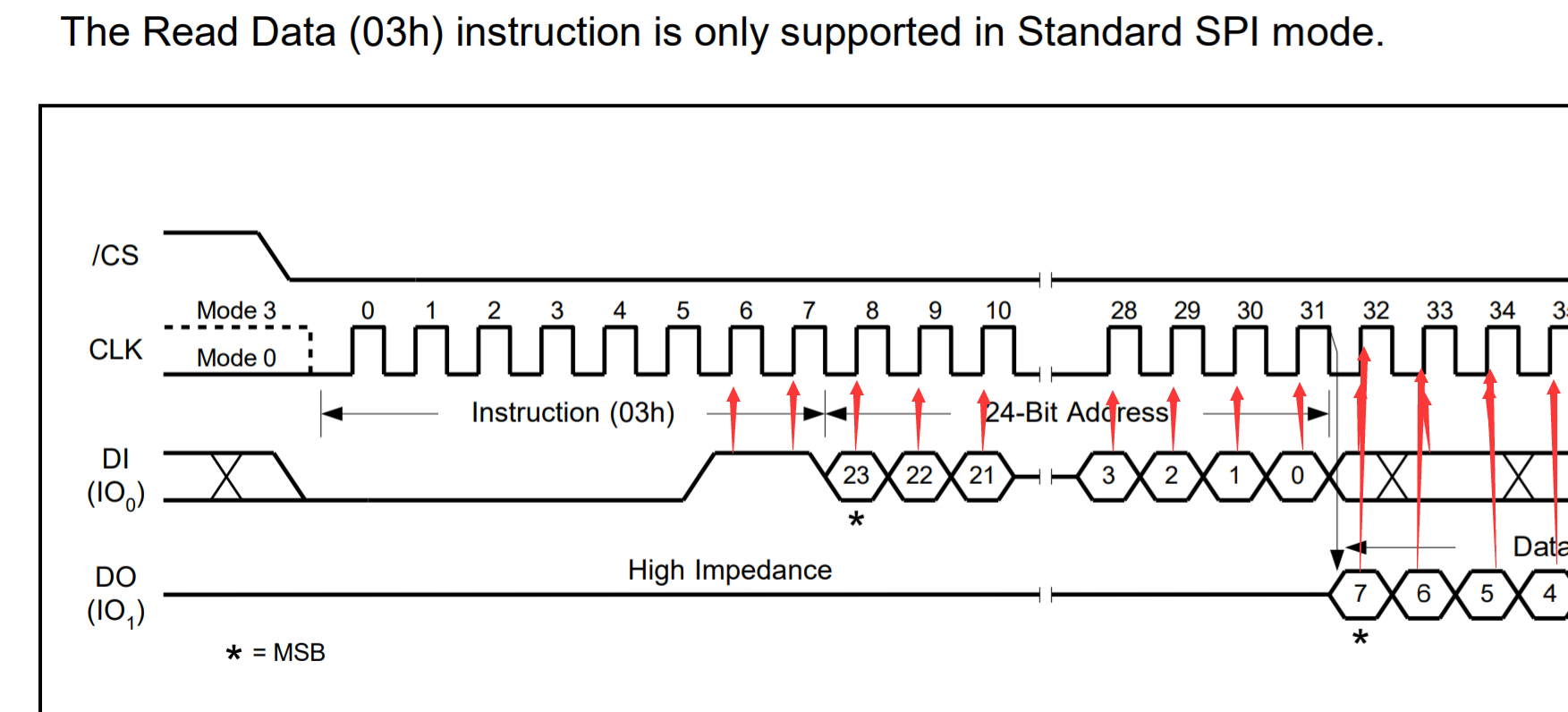
從上圖可以看出,DI和DO在數據有效區時,CLK是上升沿,下降沿的時候,DI和DO處于電平可任意變化的無效數據區。
這樣,就可以分析出模式了。
首先上升沿采集數據,通過排除法,這樣只有模式0和模式3符合條件。
然后就是CLK空閑時間要為低電平,這樣就只有模式0符合了。
所以,知道用模式0以后,單片機那邊寫程序就知道數據是從CLK上升沿讀取,或者發送,還是從下降沿了。
2.分析整體時序
分析時序,我們一定要先熟悉這個時序要實現什么功能,不同的功能雖然時序不一樣,但是發送數據的順序和定義不同。
我們現在分析的這個時序是從W25Q64這個Flash芯片讀取存儲的數據。
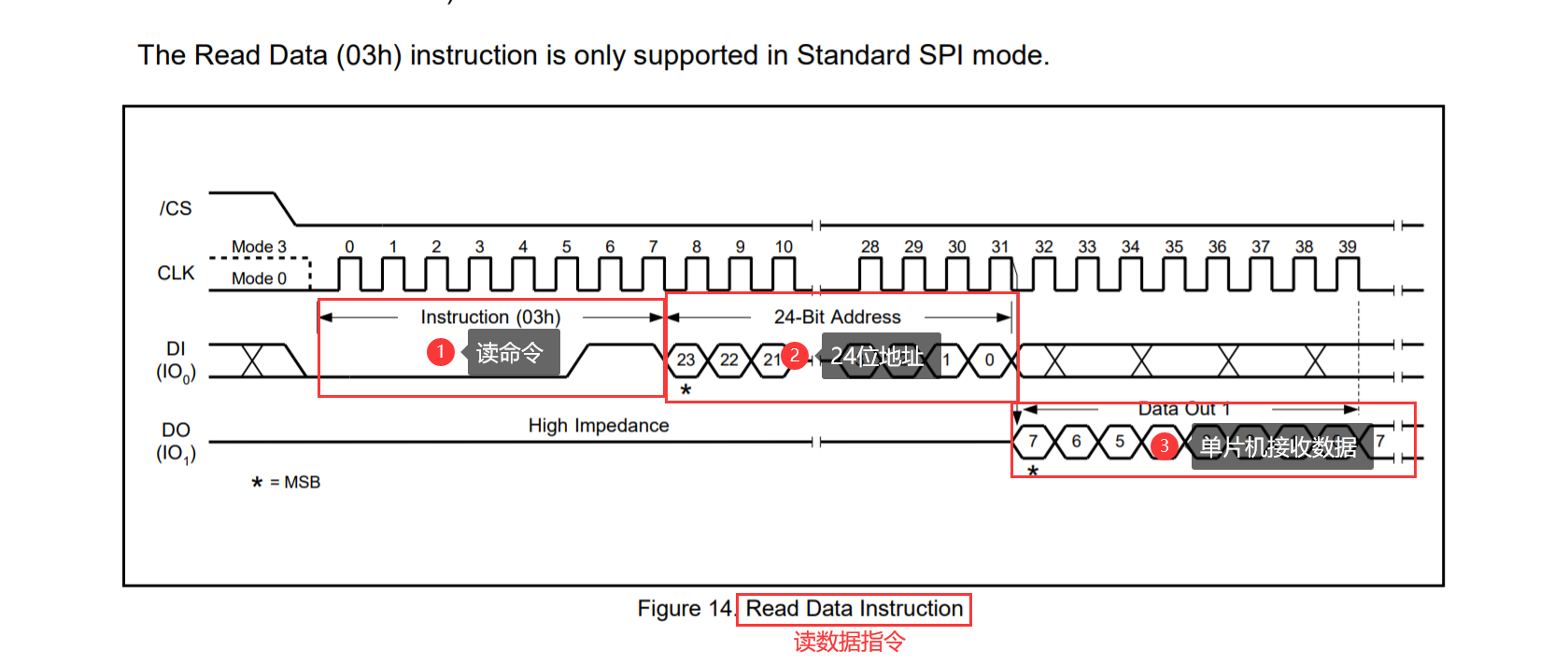
我把整個時序按CLK脈沖順序拆分成3個部分:
①讀指令
這里要注意的是,讀指令數據是在W25Q64的DI引腳產生的,DI相當于W25Q64的MISO,就是接收主控(一般是單片機)發送過來的數據。
所以,這個讀指令(0x03)是單片機發給W25Q64的。
0x03被拆分成8個Bit在DI線上傳輸,每個CLK上升沿傳輸1個Bit。
②24位地址
發完讀指令以后,單片機繼續發24位的內存地址,相當于要讀W25Q64哪個內存地址的數據。
這個數據是由單片機程序定的,所以不是固定的,大家可以看到數據位都是可以高電平,也可以是低電平。
③單片機接收數據
這個時候通信雙方的角色就變了,單片機變成了數據接收方,W25Q64變成了數據發送方。
因為數據從W25Q64的DO發出了,也就是W25Q64的MOSI引腳。
通過這個時序,單片機就可以讀到存儲在W25Q64指定地址的數據了。
如果你是我們無際單片機編程學員,看文章還不是很理解的話,可以跟我反饋,反饋的人多就直播講解,如果少就針對性一對一遠程電話講解。
三、單片機程序注意
51單片機一般沒有內置SPI模塊,所以整個時序需要自己寫程序去模擬,簡稱模擬SPI。
而STM32單片機一般有內置SPI,就不用自己寫程序去模擬時序,直接應用。
但是如果用內置SPI有一個細節,特別容易被忽略,就是你讀數據的時候,讀一個字節之前要先發一個字節任意值數據。
發一個字節任意值數據是為了在CLK總線上產生時鐘,給從機的SPI信號提供時鐘用的,從機SPI不會自己產生CLK信號的。
比如我下面這個讀數據函數:
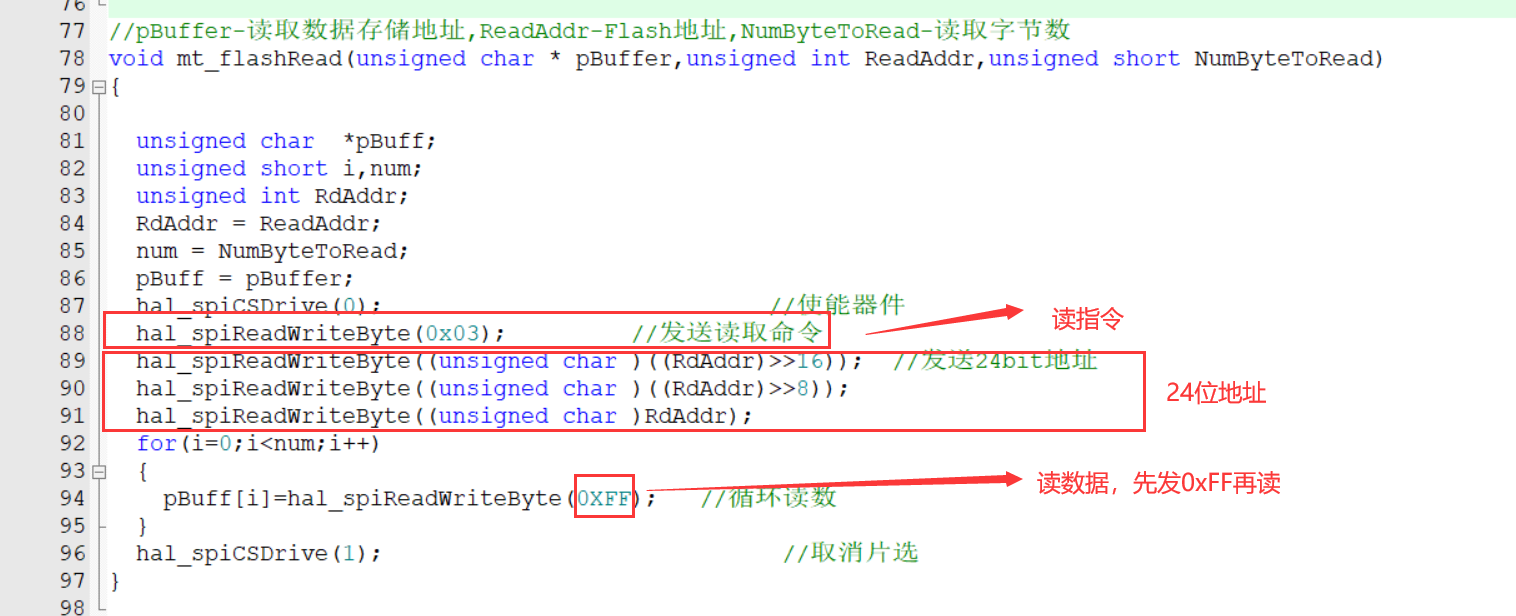
能理解到這一步,你基本上就已經吃透SPI協議了。
不管從機怎么換,比如說不是W25Q24了,換成OLED屏了,時序原理也是一樣的,只是相關的指令和寄存器不同。










評論