循線(xiàn)機(jī)器人小車(chē)系統(tǒng)電路模塊設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
首先循線(xiàn)機(jī)器人小車(chē)可以通過(guò)捕獲紅外傳感器獲取的信號(hào)來(lái)引導(dǎo)小車(chē)沿著地面上的線(xiàn)條前進(jìn)。從紅外傳感器獲取的信息經(jīng)過(guò)信號(hào)放大,送入51單片機(jī),單片機(jī)依據(jù)邏輯判斷決定小車(chē)左右兩側(cè)電機(jī)的轉(zhuǎn)速。單片機(jī)通過(guò)PWM技術(shù)來(lái)調(diào)控左右兩側(cè)直流減速電機(jī)的轉(zhuǎn)速,當(dāng)左右兩側(cè)轉(zhuǎn)速相同時(shí),小車(chē)進(jìn)行直線(xiàn)行駛;當(dāng)左側(cè)電機(jī)轉(zhuǎn)速大于右側(cè)電機(jī)轉(zhuǎn)速時(shí),小車(chē)進(jìn)行右轉(zhuǎn)彎,反之小車(chē)進(jìn)行左轉(zhuǎn)彎。小車(chē)采用雙電源供電,即控制部分采用5V直流電供電,而電機(jī)部分采用12V直流電供電。因?yàn)榭紤]到電機(jī)功率不是很大,因此沒(méi)有采用光電隔離處理。
本文引用地址:http://www.czjhyjcfj.com/article/201710/369465.htm小車(chē)5V電源部分電路設(shè)計(jì)原理圖如下:
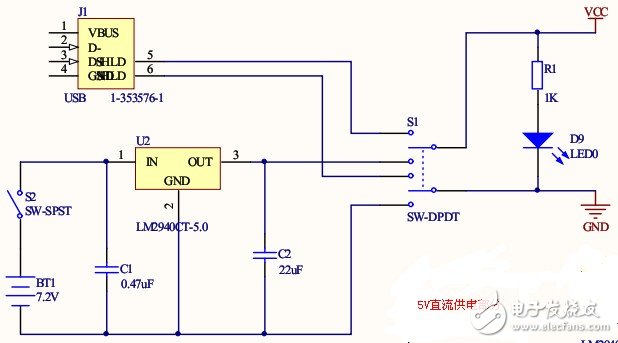
在設(shè)計(jì)中我原規(guī)劃使小車(chē)即可以通過(guò)USB供電,又可以通過(guò)充電電池組供電,具體選擇哪種供電方式通過(guò)S1開(kāi)關(guān)進(jìn)行切換。由于USB供電電源是標(biāo)準(zhǔn)的5V直流電源,因此就省去了穩(wěn)壓電路。而在通過(guò)電池組供電的電路中,當(dāng)S2開(kāi)關(guān)閉合時(shí),電池組提供的電壓經(jīng)過(guò)U2的穩(wěn)壓再介入系統(tǒng)當(dāng)中。U2我才有的是 LM2940CT-5.0,它可以將輸出電壓穩(wěn)定在5V輸出,輸出電流最大可以達(dá)到1.25A。在電路中加入D9的發(fā)光二極管用于指示是否通電,在D9前串入一個(gè)1K歐的電阻R1用于限流。
小車(chē)12V直流電源供電部分電路設(shè)計(jì)原理圖:
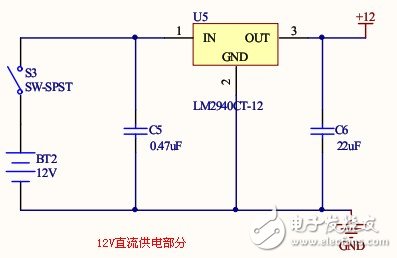
這部分電路設(shè)計(jì)同5V電源部分,只是U5部分換成了LM2940CT-12的芯片,此芯片輸出電壓為12V。
下面介紹一下小車(chē)動(dòng)力部分的電路設(shè)計(jì)原理圖:
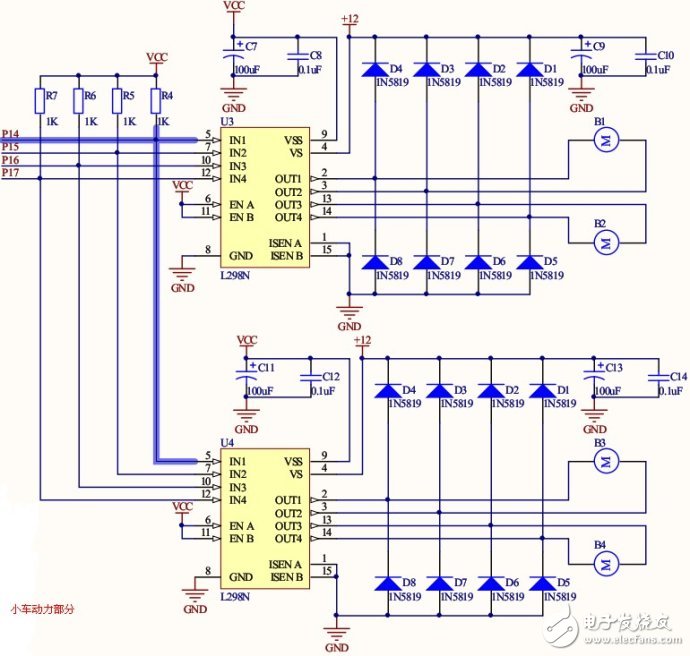
小車(chē)采用4輪驅(qū)動(dòng),左右各2個(gè)12V直流減速電機(jī),通過(guò)L298N來(lái)進(jìn)行驅(qū)動(dòng)。L298N的輸入分別接STC89C52RC單片機(jī)的P1.4、P1.5、 P1.6、P1.7口。當(dāng)P1.4、P1.5同時(shí)為高電平或者低電平時(shí)電機(jī)B1、B3停轉(zhuǎn),即小車(chē)左側(cè)車(chē)輪停轉(zhuǎn);當(dāng)P1.4輸出高電平,P1.5輸出低電平時(shí),B1、B3正轉(zhuǎn);當(dāng)P1.4輸出低電平,P1.5輸出高電平時(shí),B1、B3反轉(zhuǎn);當(dāng)P1.6、P1.7同時(shí)為高電平或者低電平時(shí)電機(jī)B2、B4停轉(zhuǎn),即小車(chē)右側(cè)車(chē)輪停轉(zhuǎn);當(dāng)P1.6輸出高電平,P1.7輸出低電平時(shí),B2、B4正轉(zhuǎn);當(dāng)P1.6輸出低電平,P1.7輸出高電平時(shí),B2、B4反轉(zhuǎn);各電機(jī)轉(zhuǎn)速的控制通過(guò)PWM技術(shù)實(shí)現(xiàn)。
小車(chē)的循線(xiàn)部分電路原理圖:
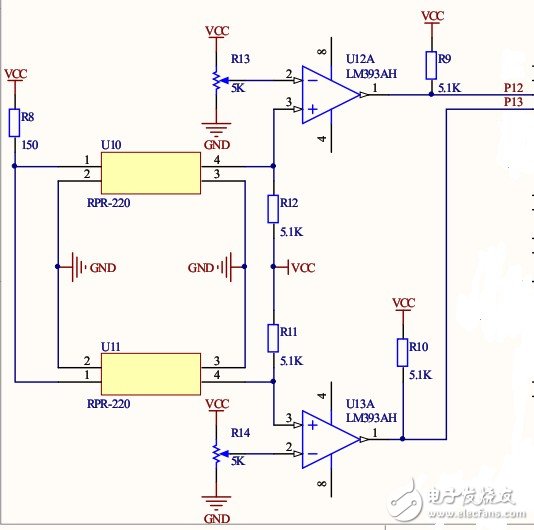
小車(chē)采用紅外發(fā)射對(duì)管RPR-220來(lái)探測(cè)地面線(xiàn)條,RPR-220采集到的信號(hào)送LM393進(jìn)行放大,然后送入單片機(jī)STC89C52RC的P1.2和P1.3口。原理圖中R13、R14是用于調(diào)諧紅外發(fā)射對(duì)管采集信號(hào)的靈敏度的。
最后是小車(chē)大腦部分的電路原理圖:
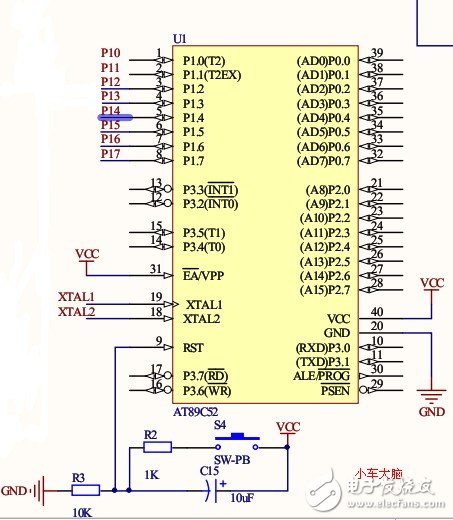
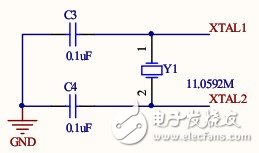
圖中繪制了STC89C52RC的復(fù)位電路和晶振部分電路。
循線(xiàn)機(jī)器人小車(chē)比較簡(jiǎn)單,不比雙足機(jī)器人有眾多活動(dòng)部件的控制和設(shè)計(jì),循線(xiàn)小車(chē)活動(dòng)部件就只是驅(qū)動(dòng)小車(chē)的車(chē)輪,控制左右車(chē)輪的轉(zhuǎn)速來(lái)控制小車(chē)前進(jìn)方向是直行,還是左轉(zhuǎn)彎,或者右轉(zhuǎn)彎,因此可以看出整個(gè)控制系統(tǒng)簡(jiǎn)單。通過(guò)簡(jiǎn)單的循線(xiàn)機(jī)器人小車(chē)的設(shè)計(jì),掌握對(duì)電機(jī)驅(qū)動(dòng)、傳感器信號(hào)采集、電源供應(yīng)、焊接技術(shù)、設(shè)備采購(gòu)、系統(tǒng)總體規(guī)劃等部分有個(gè)感性的認(rèn)識(shí),因?yàn)檫@些部分是將來(lái)所有機(jī)器人設(shè)計(jì)中不可回避的基本部分。












評(píng)論