基于并行流水線技術(shù)的RS255/RS233譯碼器設(shè)計(jì)

RS糾錯編碼是目前最有效、應(yīng)用最廣泛的差錯控制編碼之一,是一種糾錯能力很強(qiáng)的多進(jìn)制BCH碼,也是一類典型的代數(shù)幾何碼。它是由里德(Reed)和索洛蒙(Solomon)應(yīng)用MS多項(xiàng)式于1960年首先構(gòu)造出來的。
本文引用地址:http://www.czjhyjcfj.com/article/201706/349055.htmRS碼被廣泛用于差錯控制系統(tǒng)中,以提高數(shù)據(jù)的可靠性,而且可以用來構(gòu)造其他碼類,如級聯(lián)碼。在無線通信、衛(wèi)星通信、磁或光存儲以及網(wǎng)絡(luò)通信中RS碼也有較為廣泛的應(yīng)用。RS碼不僅具有良好的隨機(jī)糾錯和突發(fā)糾錯能力,而且有低復(fù)雜度的編譯碼算法,因此被國際電信聯(lián)盟(ITU)推薦為光纖子系統(tǒng)的前向糾錯(FEC)碼。RS(225,223)碼被CCSDS選為常規(guī)分包遙測信道糾錯編碼和高級在軌系統(tǒng)前向和反向鏈路的糾錯編碼,是實(shí)現(xiàn)CCSDS標(biāo)準(zhǔn)低差錯率信道糾錯編碼的關(guān)鍵部件。只要每個碼字(255個符號)中出現(xiàn)的錯誤不超過16個符號,它就能將其糾正。
近年來,關(guān)于RS(255,223)碼譯碼器實(shí)現(xiàn)的算法得到了廣泛的關(guān)注,但是這些算法的實(shí)現(xiàn)速度都不太快,即便有速度稍高的,其占用硬件資源也較多,而一些占用硬件資源較少的算法速度卻很慢。本文采用基于ME算法的8倍并行設(shè)計(jì)方案,結(jié)合流水線技術(shù),克服了上述算法的缺陷,利用盡可能少的硬件資源獲得了極高的譯碼速度。
1 RS(255,223)碼及其譯碼原理
1.1 RS(255,223)碼
因其碼元取自GF(q),RS編解碼過程中的所有運(yùn)算都是在GF(q)的有限域上面進(jìn)行。RS(n,k)碼的編碼過程是將k個輸入信息碼字,用生成多項(xiàng)式產(chǎn)生(n,k)個冗余的糾錯信息碼字,與原碼字合成形成n個信息碼字進(jìn)行傳輸。譯碼是在接收端,對接收的n個碼字信息進(jìn)行糾錯處理,恢復(fù)k個信息碼字。對于1個長度為am-1符號的RS碼,每個碼字都可以看成是有限域GF(am)中的1個元素。最小碼距為d的碼字,其RS碼生成多項(xiàng)式具有如下形式:
其中ai是GF(am)中的1個元素。
對于RS(255,223)碼而言,q=256,a=2,碼字符號在GF(28)中。m=8,是每個RS符號的碼元數(shù);n=28-1,是每個RS碼字的符號數(shù);k=223,是RS碼中信息位的符號數(shù);t=16,是RS碼字內(nèi)符號的糾錯能力;d=33,是最小碼距。
1.2 RS(255,223)碼譯碼原理
由于RS碼為分組碼,故其譯碼算法主要由伴隨式計(jì)算、關(guān)鍵方程求解和錢搜索和Forney算法3部分構(gòu)成,譯碼器結(jié)構(gòu)如圖1所示。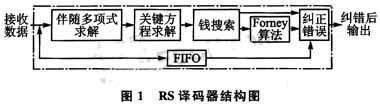
首先,根據(jù)接收碼字乘以校驗(yàn)矩陣得到其伴隨多項(xiàng)式,對于RS(225,223)碼,其伴隨式求解式可以表示為:
求得伴隨式以后,則利用伴隨多項(xiàng)式求解關(guān)鍵方程:錯誤位置多項(xiàng)式σ(x)和錯誤特征多項(xiàng)式ω(x),如下所示:
求解關(guān)鍵方程現(xiàn)可采用的算法主要有BM(Belekamp-Messey)算法和ME(Modified Euclidean)算法。之后便得到錯誤位置多項(xiàng)式σ(x)與錯誤特征多項(xiàng)式ω(x)。
此后,由錯誤位置多項(xiàng)式與錯誤特征多項(xiàng)式來求得錯誤位置與錯誤值。求解錯誤位置本設(shè)計(jì)采用窮舉算法——錢搜索算法來完成。同時,使用Forney公式求得錯誤值。最后,用延時后的接收值減去錯誤值,得到最后的譯碼輸出。Forney公式可以表示為:
其中,ei代表發(fā)生在i位置上的錯誤值,σodd(x)代表錯誤位置多項(xiàng)式奇數(shù)次項(xiàng)之和。
2并行流水結(jié)構(gòu)方案
本設(shè)計(jì)采用8倍并行流水方案。將255個碼元8倍并行后,只需要32個周期便完成所有32個伴隨多項(xiàng)式系數(shù)的求解。然后將32個伴隨多項(xiàng)式系數(shù)順序輸出到下一級,在此基礎(chǔ)上采用流水線結(jié)構(gòu),周期剛好滿足且不會浪費(fèi)資源。本設(shè)計(jì)中所有乘法器都是采用GF(28)有限域乘法器。
2.1 伴隨式計(jì)算
8倍并行伴隨多項(xiàng)式的求解算法,是在迭代算法的基礎(chǔ)上展開實(shí)現(xiàn),其推導(dǎo)過程如下: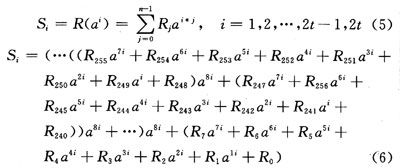
式(6)中,R255=0;i=1,2,…,2t-1,2t。其電路結(jié)構(gòu)如圖2所示。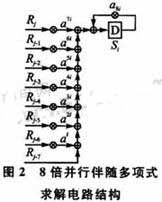
2.2 關(guān)鍵方程求解
本設(shè)計(jì)中關(guān)鍵方程的求解采用ME算法。BM算法具有反饋結(jié)構(gòu),不適合使用流水結(jié)構(gòu),而ME算法可采用流水結(jié)構(gòu)。其算法描述如下:
其中,S(x)為輸入的伴隨多項(xiàng)式。
ME算法為1種迭代算法,目的在于求i階余式Ri(x),相應(yīng)的多項(xiàng)式ri(x)與Li(x)滿足:
ri(x)A(x)+Li(x)S(x)=Ri(x)(8)
當(dāng)i階余式Ri(x)的階數(shù)小于t時,迭代算法結(jié)束。算法結(jié)束時的Ri(x)即為錯誤特征多項(xiàng)式ω(x),而Li(x) 即為所求的錯誤位置多項(xiàng)式δ(x)。
ME算法在每一次迭代時進(jìn)行的運(yùn)算為:
具體推導(dǎo)請見參考文獻(xiàn)[8-9]。
單級迭代電路結(jié)構(gòu)如圖3所示。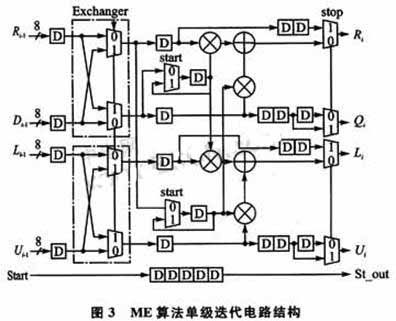
由ME算法推導(dǎo)可知,使用脈動電路結(jié)構(gòu)實(shí)現(xiàn)ME算法時,至多使用2級迭代電路即可降低R(x)多項(xiàng)式階數(shù)1階。因此,脈動電路結(jié)構(gòu)采用32階流水結(jié)構(gòu)電路即可保證迭代算法完成收斂得到最后結(jié)果。電路結(jié)構(gòu)如圖4所示。
2.3 錢搜索和Forney算法
錢搜索模塊接收KES模塊的錯誤位置多項(xiàng)式信號δ(x),利用錢搜索算法逐個檢查符號位是否發(fā)生錯誤,輸出錯誤位置和錯誤位置多項(xiàng)式的奇數(shù)項(xiàng)之和,供EE模塊計(jì)算錯誤圖案和糾錯。
設(shè)錯誤位置多項(xiàng)式δ(x)可以表達(dá)為奇數(shù)項(xiàng)和偶數(shù)項(xiàng)之和: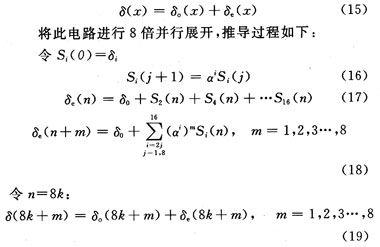
并行錢搜索電路子結(jié)構(gòu)如圖5所示。圖中m表示并行模塊編號數(shù),m=1,2,…,8。所有的乘法器均是常數(shù)乘法器,8倍并行結(jié)構(gòu)由圖5所示的8個同樣的結(jié)構(gòu)組成。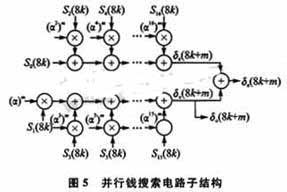
EE(錯誤值計(jì)算)模塊根據(jù)CS模塊輸出的δodd(x)以及KES模塊輸出的ω(x)計(jì)算出錯誤圖案。
EE模塊需要求解w(ai),電路結(jié)構(gòu)推導(dǎo)過程和求解δ(ai)的過程一樣,電路結(jié)構(gòu)也基本相同,這里不再累述。
3 仿真驗(yàn)證與綜合
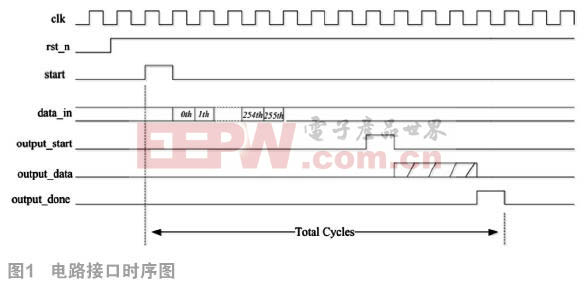
上述譯碼器采用自頂向下的設(shè)計(jì)流程劃分模塊,用Verilog HDL完成RTL代碼的編寫,然后在Mentor公司的ModelSim SE 6.1b仿真驗(yàn)證工具下編寫測試代碼進(jìn)行仿真驗(yàn)證。仿真結(jié)果如圖6所示,譯碼器能正確實(shí)現(xiàn)譯碼功能。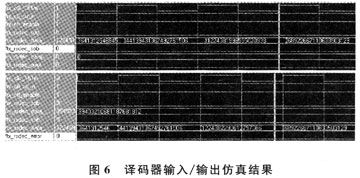
因本譯碼器可糾正16個錯誤,超過16個錯誤便不可糾正,在仿真時譯碼輸入樣本采用了2種:一種樣本不超過16個錯誤,另一種樣本超過16個錯誤。仿真結(jié)果表明,此譯碼器能在不超過16個錯誤的樣本下正常譯碼。
譯碼器在Quartus II 8.0上進(jìn)行綜合和優(yōu)化,采用Altera公司Cyclone系列的EP2C15AF256C8芯片為目標(biāo)器件。譯碼器的工作時鐘頻率可達(dá)85 MHz,數(shù)據(jù)吞吐率可達(dá)5 440 Mb/s,占用邏輯單元數(shù)為13 947個(片內(nèi)共14 448,占用率為97%),RAM占用16 698位(片內(nèi)共239 616位,占用率為7%)。譯碼器性能對比如表1所列。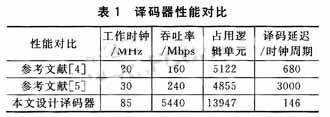
與參考文獻(xiàn)[4]相比,由于本譯碼器采用了并行結(jié)構(gòu)在增加了不到3倍的硬件資源的情況下,吞吐率時鐘比(吞吐率/時鐘)提高了8倍,而且縮短了3/4的澤碼延遲。與參考文獻(xiàn)[5]相比,本文所采用的譯碼器增加了不到3倍的硬件資源,提高了8倍的吞吐率時鐘比。由于參考文獻(xiàn)[5]采用串行譯碼結(jié)構(gòu),本文所采用的并行流水譯碼結(jié)構(gòu)較串行譯碼結(jié)構(gòu)縮減了19/20的譯碼延遲。

評論