基于AT89S52的智能簡易車輛系統設計

摘要 介紹了以單片機AT89S52為控制核心的智能簡易車輛系統設計方案。系統根據角度傳感器檢測的信號,控制小車在蹺蹺板上做相應運動,其中采用角度傳感器感應板面水平角是否為零,確保小車達到平衡。同時采用反射式光電傳感器感應板面引導線,保證小車不脫離軌道,并指引小車在規定區域人忱爬上板面。系統顯示裝置采用RT1602液晶顯示器,能夠實時顯示行距、時間;小車動力源采用步進電機,并用SFA475集成晶體管芯片構成的橋式電路對其驅動,電源直接由12 V蓄電池供電,單片機根據各模塊檢測的信號作出判斷,保證小車正常行動。
本文引用地址:http://www.czjhyjcfj.com/article/201610/309974.htm智能車輛是一個集環境感知、規劃決策、自動行駛等功能于一體的綜合系統其集中應用了計算機、傳感、信息、通訊、導航、人工智能及自動控制等技術是典型的高新技術綜合體。本文設計的智能簡易車輛系統就是此綜合體的一種嘗試。該系統使智能簡易車輛在多種傳感器的配合下實現了自動尋跡、平衡探測等功能,已基本實現了車輛的智能化。
1 智能簡易車輛電路總體結構設計
文中簡易智能車輛系統通過電動車蹺蹺板這一實驗實現。采用AT89S52作為電動車蹺蹺板的控制核心,用紅外傳感器檢測小車是否在制定軌道上運動,小車若偏離軌道,傳感器便會發出一個信號送至單片機,使單片機控制步進電機的轉動。同時通過角度傳感器來識別小車是否到達平衡位置。
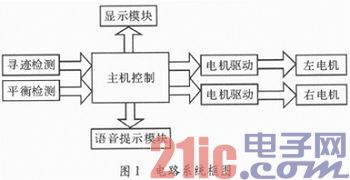
總體電路系統包括主機控制模塊、平衡檢測模塊、尋軌檢測模塊、顯示模塊、電動驅動模塊及語音提示模塊6個部分。主機控制模塊是該電路系統的核心,將平衡檢測模塊和尋跡模塊檢測到的信號進行運算處理,輸出給電機驅動模塊來控制左右電機,從而控制小車的前進及后退。同時,主控模塊還會輸出控制信號至顯示模塊以顯示行距及時間,并控制語音提示模塊適機發出提示音。電路系統框圖如圖1所示。
2 電硬件設計
2.1 主機控制模塊
主機控制模塊采用ATMEL公司生產的低電壓、高性能8位單片機AT89S52,該單片機內含8 kB可反復擦寫的只讀存儲器和256 Byte的隨機數據存儲器,其特點是高密度、非易失性存儲、微功耗,系統穩定及可靠性高。此外,AT89S52技術成熟,價格低廉,參考資源豐富,且應用也較為廣泛,再加之本系統能使該單片機資源得到充分的使用,故選擇其作為智能小車電路的核心控制。
2.2 顯示模塊
顯示模塊使用16位字符型液晶(LED)顯示。液晶顯示屏具有低功耗、平面直角顯示、可視面積大、畫面效果好、分辨率高、抗干擾能力強的優點。并可直接使用單片機上I/O口,無需過多的外圍器件便可實現多項功能。
2.3 電機及驅動模塊
電機及驅動模塊中的電機部分采用步進電機,該電機力矩大,精度高,只接收一個脈沖。就可轉動一個固定的角度,因此利用晶體管組成的橋式驅動電路,單片機可較好地控制步進電機的速率、路程、轉向等,可達到精密控制,且系統也較為穩定。此外由于系統對電機的精度及其靈敏度要求較高,而步進電機和該驅動電路的組合完全可達到這一要求,故采用步進電機和驅動電路。
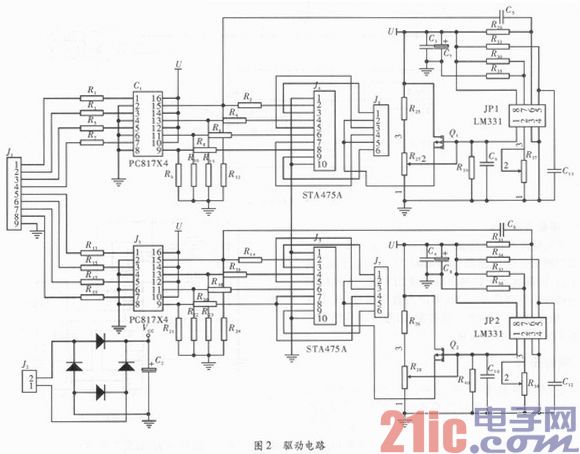
驅動電路如圖2所示。驅動模塊是本設計的動力源,為此在信號線與主控板接口相連前,采用光耦器件PC817進行隔離,防止電路中大電流燒毀主控板器件;考慮到步進電機的輸出力矩隨工作頻率下降較快,而低頻時所需的電壓又過低,若采用較高的電壓有可能燒毀步進電機的驅動,為此要實現小車的精確控制對驅動則有一定的要求,需基本滿足衡力矩輸出。STA475A是一款電機驅動芯片,廣泛應用于打印機及各種驅動控制板上,其NPN型的達林頓管。在此采用頻率電壓轉換電路來補償步進電機高頻工作時所需的電壓。V/F轉換器件LM331的作用是將頻率信號轉化為電壓信號,用此信號來控制大功率限流場效應管,保證驅動電流不會因頻率過高而減小,以恒力矩輸出,從而保證電動機的力矩能帶動電動車順利運行。
2.4 尋跡模塊
自動尋跡是基于自動導引小車(Auto-Guided Vehicle,AGV)系統,實現小車自動識別路線,判斷并自動規避障礙,以選擇正確的行進路線。其采用與地面顏色有較大差別的線條作為引導,并使用傳感器感知導引線和障礙判斷。
實現機器人的視覺和接近覺功能有多種方式:(1)可使用CCD攝像頭進行圖像采集和識別方法,但不適用于小體積系統,且還涉及圖像采集、圖像識別等領域。(2)電容式接近傳感器,基于檢測對象表面靠近傳感元件時的電容變化。(3)超聲波傳感器,根據波從發射到接收的傳播過程中所受到的影響來檢測物體的接近程度。(4)紅外反射式光電傳感器,其包括一個可發射紅外光的固態發光二極管和一個用作接收器的固態光敏二極管。
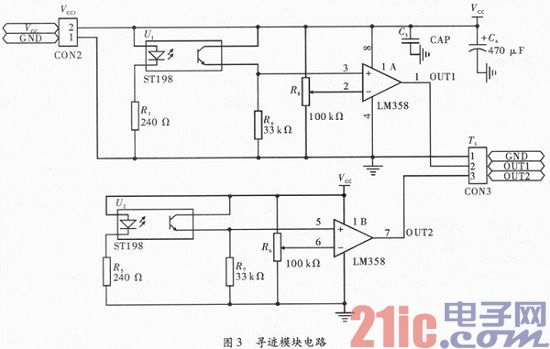
系統的尋跡檢測模塊采用反射式紅外傳感器來檢測蹺蹺板上的黑線,由于黑線可用黑筆直接在蹺蹺板軌道上畫出,故可不考慮其質量對蹺蹺板的影響。紅外傳感器發射和接收均是不可見光,抗干擾能力強,靈敏度高,同時尺寸小、質量輕、外圍電路簡單,安裝方便,因此用其作為近距離檢測是較理想的。尋跡模塊電路如圖3所示,集成反射式光電傳感器ST198的電壓驅動為4.5~5 V。當發射二極管導通時,發出紅外光線,使接收管的集電極和發射極間電阻變小,而比較器正向輸入端電位被拉高,當紅外光線照射到黑色線上時,反射光較少,接收管集電極和發射極間的電阻增大,則比較器正向輸入端電位被拉低,單片機根據此信號控制電機的正反轉動。
2.5 平衡檢測模塊
平衡檢測模塊電路如圖4所示。采用ADI公司出品的雙軸加速度傳感器ADXL202,該產品成本低、功耗小,且內部敏感元件和后續電路相集成。ADXL202傳感器外圍電路簡單,同時輸出為數字信號,抗干擾強、靈敏度高、易于用單片機控制,故選擇該傳感器作為本系統的平衡檢測模塊。









評論