機載導彈一控四電動舵機控制器研究與設計

摘要:電動舵機作為導彈飛行的執行機構,其體積重量的減少有利于導彈性能的提升。為了減小體積重量和節約成本,電動舵機采用三相無刷直流電機+滾珠絲杠直連式結構,采用一個控制器來控制四路舵機。介紹了控制器的硬件結構方案和控制策略,控制器以DSP+CPLD為核心架構,采用位置、速度雙閉環PI控制,實現單一控制器同時控制四套電動舵機相互獨立工作。實驗結果表明,控制器可以正常工作,舵機帶寬可達到25Hz。
本文引用地址:http://www.czjhyjcfj.com/article/201610/306589.htm舵機系統是導彈控制系統的執行機構,在導彈飛行過程中舵機控制器接收彈載計算機的舵偏角信號,控制電機旋轉,從而驅動舵面偏轉,產生彈體所需要的控制力矩控制彈體飛行。隨著導彈性能要求不斷提升,人們對于電動舵機系統的整體要求向著體積不斷減小,承載能力不斷增強,控制性能不斷提高的方向發展。稀土永磁材料和新型大功率電子器件使電動舵機的小型化成為可能。本文舵機系統采用三相無刷直流電機+滾珠絲杠直連式結構。為了減小舵機的體積和重量,舵機系統采用一個舵機控制器控制四套舵機。控制器以DSP+CPLD為核心架構,DSP作為主控CPU,CPLD用于做接口處理,采用位置環和速度環進行雙閉環控制。
1 舵機控制器硬件設計
舵機控制器硬件結構如圖1所示。舵機控制器以DSP為核心控制器,用CPLD做邏輯處理,DSP和CPLD之間通過數據線、地址線和控制線相連。外部電路包括電源轉換電路,電位計的AD采集電路,串口和CAN總線接口電路,霍爾信號和編碼器信號接口電路,隔離驅動電路,三相橋式功率主電路。
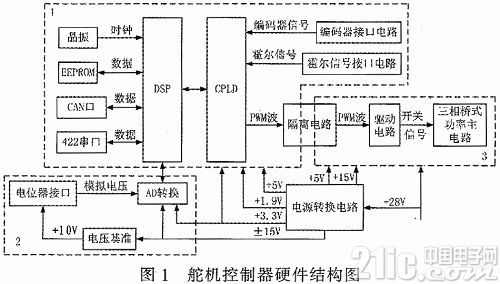
舵機控制器分為功率電路、數字電路、模擬電路3部分。圖1中虛框1為數字電路部分,虛框2中為模擬電路部分,虛框3中為功率電路部分。舵機控制器的功率地和彈上熱電池的地是共在一起的,通過兩個隔離的DC—DC模塊分別將數字地和模擬地與功率地進行隔離,數字地和模擬地通過磁珠單點連接在一起。
電源轉換電路將彈上熱電池的28 V電壓轉換成舵機控制器上數字電路部分所需的+5 V、+3.3 V和+1.9 V,模擬電路部分所需的±15 V,功率電路部分所需的+5 V和+15 V。
DSP為整個控制系統的核心,完成電位器AD采樣的控制,系統保護、控制算法的實現和通信等任務。TMS320F28335高速計算能力及豐富的內部集成模塊,不僅簡化了系統外圍模塊的設計,也降低了對這些模塊支持的應用程序的編寫難度,從而使系統的集成度、可靠性得到提高。由于整個系統多達4個舵機,有 12路霍爾信號和12路編碼器脈沖信號,因此外加邏輯器件來實現邏輯仲裁和脈沖信號的采樣,CPLD型號為Altera公司的EPM1270,CPLD主要完成速度環的采樣和PWM控制信號的生成。編碼器輸出信號為差分信號,通過TI公司的芯片SN65175D轉換為單端信號,再通過電平轉換芯片 SN74LVC4245與CPLD相連,在CPLD內完成對編碼器輸出脈沖個數的計數,通過數據線、地址線和控制線與DSP進行通信,完成系統對電機速度信號的采集。三路霍爾信號與DSP輸出的PWM信號以及方向信號在CPLD內進行邏輯組合,得到驅動舵機電機所需的六路驅動信號。
舵機系統采用電位器檢測位置信號,與舵機輸出軸相連的電位器由電壓基準芯片MAX6176提供+10V的壓基準,電位器輸出抽頭部分的電壓經由運算放大器 INA128構成的射極跟隨器后通過AD轉換與DSP相連。DSP自帶的12位的AD無法滿足系統位置分辨率小于0.001°的要求,所以外擴一個16位的AD轉換器,型號為AD公司的AD7606。
主電路與控制電路之間通過磁耦進行隔離,隔離芯片型號為ADUM1401,驅動芯片采用IR公司的IR2136,它由單電源供電,工作頻率可達十萬赫茲以上,具有強大的欠壓和過流保護功能。
舵機控制器的通信接口包括CAN總線接口和隔離式RS-422串口。CAN總線接口用于調試使用,驅動芯片選擇TI公司的SN65HVD230。隔離式 RS-422串口用于與彈上其他設備進行通信,驅動芯片選擇AD公司的ADM2582。為了能夠在線配置系統參數。利用DSP的SPI接口外擴了 EEPROM芯片。
通過以上設計,控制器可實現舵機的自動控制與對外通信等功能。
2 舵機控制器軟件設計
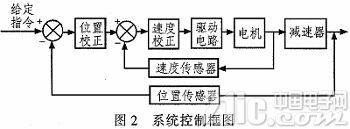
舵機控制器能夠實現位置外環和速度內環雙閉環控制,舵機的控制系統框圖如圖2所示。
舵機控制器軟件包括DSP部分的程序和CPLD部分的程序。控制主程序在DSP完成,CPLD完成編碼器脈沖的計數和PWM控制波的生成。DSP內程序主要完成以下工作:
1)通過RS-422總線接收并解碼彈載計算機發出的控制指令,并發送舵偏角反饋指令給彈載計算機;
2)對位置、速度傳感器數據的采集與處理;
3)控制律計算;
4)生成PWM波。
根據、DSP內程序的主要功能,DSP內程序由以下幾部分組成:
1)初始化模塊;
2)數據采集與處理模塊;
3)控制律計算模塊;
4)PWM波生成模塊;
5)串口通信模塊。
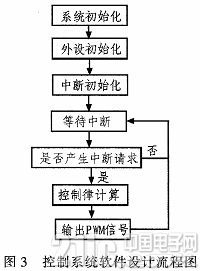
舵機控制器的軟件流程圖如圖3所示。
3 實驗結果
根據導彈技術指標要求,電動舵機技術指標如表1所示。
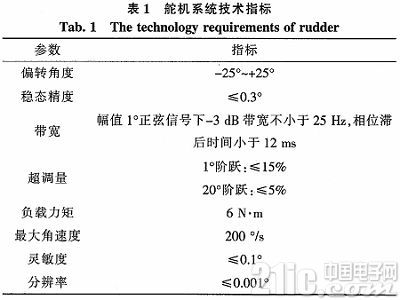
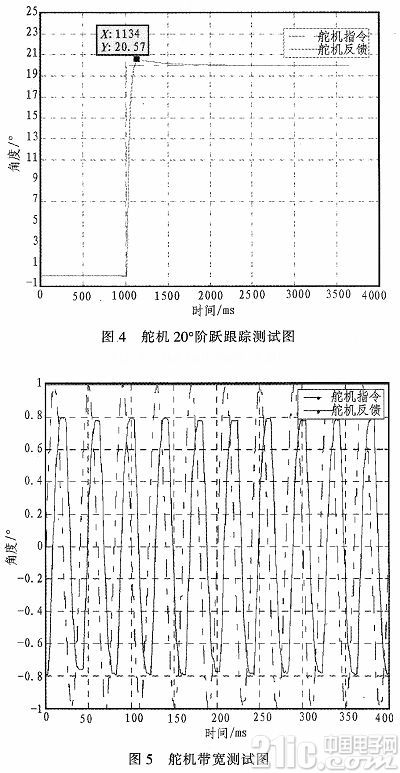
舵機系統采用三相無刷直流電機+滾珠絲杠直連式結構,減速比為143。舵機跟蹤20°階躍信號結果如圖4所示,超調量小于5%。舵機跟蹤1°25 Hz正弦信號結果如圖5所示,跟蹤幅值衰減到0.8°,大于0.707°,延遲時間為8 ms,小于12 ms。圖4和圖5中虛線為位置指令,實線為舵機實際跟蹤曲線。
4 結論
實驗結果表明,電動舵機系統的性能指標達到技術指標要求,本文所設計的以DSP+FPGA為核心的一控四舵機控制器設計合理,工作可靠,減小了舵機系統的體積和重量,可以應用于導彈舵機系統當中。











評論