無線車輛管理調度系統的設計與實現

引言
本文引用地址:http://www.czjhyjcfj.com/article/196870.htm隨著車輛數量的迅速增加,高效的車輛管理調度系統已經成為各個車輛管理調度部門亟需的工具。而以 GPRS(通用分組無線業務)和WLAN(無線局域網)為代表的無線通信技術、以GPS(全球定位系統)為代表的無線定位技術以及日益成熟的嵌入式系統軟硬件,都為先進的無線車輛管理調度系統提供了技術基礎。
本文所實現的車輛管理調度系統中,車載終端是基于 Intel XScale處理器的嵌入式系統,外擴WLAN和GPRS實現與管理調度中心的無線通信;外擴GPS模塊進行實時定位。而管理調度中心則是運行于PC機上并且具有友好人機界面的軟件系統。PC機擴展WLAN和GPRS模塊,從而可以實時地獲知系統中車輛的當前位置等信息并進行調度。同時,系統預留了豐富的功能擴展空間,可進行二次開發。
1 系統總體方案論證與選型
在本系統的總體方案中,無線通信技術、無線定位技術和嵌入式系統軟硬件技術是車輛調度系統實現的3個關鍵要素。以下分別對這3方面的主要備選技術進行介紹,并通過論證選取最合適的技術方案。
無線通信方面,GPRS和WLAN兩者各有優缺點。CPRS主要優點是具有廣闊的覆蓋范圍,可以支持語音傳輸;而其劣勢則主要是數據傳輸速度較慢,同時其使用費用將與數據流量成正比。WLAN的優缺點表現出與GPRS互補的特征,其主要優點在于可以提供較高的數據傳輸速率,同時使用費很低,一旦WLAN網絡架設完成后,除了很少地維護工作外,其他幾乎不涉及任何費用;其劣勢主要是尚不支持語音業務,同時覆蓋范圍一般較小,目前尚無法與GPRS相比。基于上述分析,所以從本系統功能優化和利于使用的角度考慮,決定將兩者都加入到系統中。同時,考慮到GPRS和WLAN在數據速率以及使用費用上的差異,所以當車輛處于WLAN覆蓋區內時,管理調度中心則優先選擇通過WLAN網絡與車輛進行通信;當車輛處在WLAN覆蓋區域之外而在GPRS覆蓋區域內時,則通過 GPRS與車輛進行通信。
無線定位系統方面,目前主要有美國的GPS、俄羅斯的CLONASS、我國自主開發的“北斗衛星定位導航系統”等可供選擇,其中GPS的性能、覆蓋范圍、定位精度等性能等具有明顯優勢,目前應用也最為廣泛。因而,決定采用GPS作為本系統的無線定位模塊。
嵌入式系統的軟硬件方面,目前有很多可選擇的方案。以下分硬件和軟件兩部分討論。
在硬件方面,嵌入式CPU的選擇非常重要。目前使用較為廣泛的嵌入式CPU主要有:Intel的XScale系列,主要用于手持終端;SAMSUNG的 S3C24XX系列,主要用于消費類電子產品;FreeScale的PowerPc和ColdFire系列,主要用于POS機、工業控制;Atmel的 AT91系列,主要應用于工業控制等。根據本系統需要擴展的WLAN等各種外設模塊以及有可能需要處理多媒體業務的應用需求,因此選用Intel的 XScalePXA255@400 MHz作為車載設備的CPU。此CPU主頻為400MHz,廣泛應用于HP、Dell等國際知名廠商所生產的個人手持終端中,具有性能優秀、運行穩定的特點。在CPU選定的基礎上,選用64 MB SDRAM、16MB NOR Flash存儲器和128 MB NAND Flash存儲器,與CPU共同構成核心嵌入式系統。
在嵌入式系統的軟件方面,首要的是操作系統(OS)的選擇。主要的備選方案有WinCE.Net和嵌入式Linux。其中,WinCE.Net具有更類似于Windows的用戶界面和操作方法,可以使實際使用更加便捷。同時,由于本系統的車載終端需要讓最終用戶可自行定制開發應用軟件,所以具有便捷的軟件開發平臺也是很重要的。在此方面,WinCE.Net也具有明顯的優勢,因此選用WinCE.Net作為車載沒備的OS。
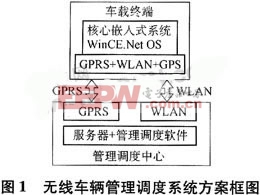
除了上述3方面的論證之外,還有管理調度中心的問題。為了實現的便捷,管理調度中心采用一臺性能較強的PC機作為服務器,通過擴展模塊接入GPRS網絡、WLAN網絡,同時運行管理調度軟件,從而完成管理和調度的工作。
根據以上的方案論證與選擇,可以得到如圖1所示的系統方案框圖。
2 系統的硬件設計
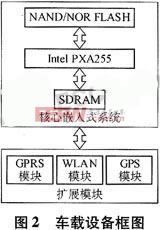
如上所述,管理調度中心準備采用PC機作為硬件平臺。因此,本系統的硬件設計工作主要集中在車載端。根據上述的方案論證與選型,可以得到如圖2所示的車載終端硬件框圖。
在擴展模塊中,GPS模塊選用FALCOM公司設計生產的JP7模塊,它是一個12通道GPS接收機,具有25.4 mm×25.4 mm x3 mm的超小體積,支持3D/2D/差分定位,3D定位模式時定位誤差最大為10 m。在本系統中,將此模塊通過兩線串口連接到核心嵌入式系統上,從而可以使車載設備能夠實時地獲得準確的位置和時間信息。
CPRS 模塊選用的是SIEMENS MC35i,它是一個全功能的GSM/GPRS模塊,支持 EGSM900和GSM1800雙頻,支持GPRS Class 8,數據速率最高可達85.6 kbit/s。在本系統中,將此模塊通過8線串口連接到核心嵌入式系統上,所有工作都由核心系統通過AT指令進行控制。它既可以作為一個能夠撥打電話、收發短信的蜂窩電話,同時在需要接人GPRS網絡時也可以作為一個無線Modem。
WLAN模塊的選擇主要是考慮到市場上已經有了各種性能穩定、接口多樣的WLAN網卡產品,而我們所選擇的PXA255 CPU可以很容易地外擴出PCMCIA接口,因此決定選用PCMCIA接口的WLAN網卡。在本系統中所選用的網卡型號為Cisco LMC352,主要是由于此款網卡的性能較好,同時也支持外接雙天線,這樣可以將天線安裝在車載終端外甚至汽車外殼上,從而減少汽車外殼對WLAN信號的屏蔽作用。
除了上述的擴展模塊外,還從CPU上引出了USBDevice接口,可用于軟件的調試;擴展了2個 RS-232串口,可用于今后連接其他的串口設備;擴展了1個VGA接口、2個PS-2接口,這樣就可以在車載終端上使用顯示器和鍵盤鼠標,實現車載終端的可視化操作,同時也方便調試和更新軟件。
3 系統的軟件設計
3.1 管理調度中心軟件
管理調度中心軟件流程如圖3所示。
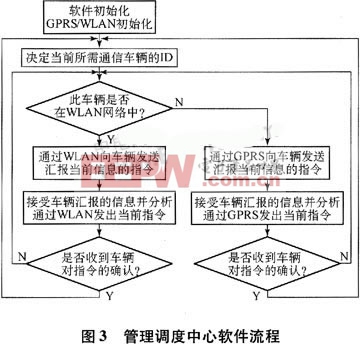
管理調度中心的軟件運行于一臺擴展 GPRS和WLAN模塊的PC機或者小型服務器上,可以隨時接入GPRS和WLAN網絡,而接入網絡后的控制和數據收發則由管理調度軟件來控制。圖3中未標出軟件退出路徑,因為實際使用中在任何時刻用戶都可以關閉軟件而退出管理調度軟件系統。
本軟件的開發環境為 Visual Studio.NET 2003,采用C語言。軟件首先對與GPRS模塊相連接的串口進行初始化,同時也檢測本機擴展的WLAN模塊是否已經找到附近的AP并接入,正常情況下兩者的初始化均可在較短時間內完成,然后進入空閑狀態。當用戶有調度的要求時,則需要首先確定日標車輛的ID(標識符),這個ID既可以是每個車載終端唯一的IP地址或車牌號碼,也可以人為地給每個車輛指定一個更容易記憶的ID。隨后判斷此ID對應的車輛是否處于WLAN網絡所覆蓋的區域內,這是通過在 WLAN網絡上向該車載終端發送一個查詢信息來實現的。如果車輛在WLAN網絡中,那么車載終端立即向調度中心發送消息確認自己處于WLAN網絡中,此時軟件則優先使用WLAN與車輛進行通信;如果車輛不在WLAN網絡中,那么無法收到調度中心的查詢信息,因而也無法向調度中心回復確認消息,此時調度中心將使用GPRS與車輛通信。使用GPRS的過程中涉及到一個移動IP的問題:車載端每次撥號連接上GPRS網絡時,其IP地址一般都不一樣,所以無法采用 WLAN網絡中的IP地址與車輛綁定的方法。此時常用的解決方法是調度中心采用短信方式,首先要求車載終端上報其IP地址,然后再進行通信。當管理調度中心的指令發出后,軟件則等待車載端回復確認消息。通過車輛確認的方法,可以確保車輛準確地收到了管理調度中心發出的指令,使得系統的誤操作概率最小。
3.2 車載終端軟件
車載終端軟件運行在基于XScale PXA255的嵌入式車載終端上,采用WinCE.Net 4.2作為操作系統。將不同的車輛管理調度系統中存在很大差異的具體業務內容剝離,即可得到如圖4所示的車載端軟件流程圖。圖中未標出軟件退出路徑,因為實際使用中在任何時刻用戶都可以關閉軟件而退出車載終端軟件系統。
本系統的車載端應用軟件采用Visual Studio.NET中的Smart Client工程模式進行開發,使用C語言。如圖4所示,本軟件首先進行初始化的工作,將GPRS/WLAN/GPS所在的各個端口打開,開始供電。對于 GPRS模塊,上電后則會自動搜索GSM網絡。如果所在位置有GSM網絡覆蓋,則自動接入并穩定在可以隨時撥打/接聽電話和收發短信的空閑狀態;如果無 GSM網絡覆蓋,則定時重新搜索網絡。對于WLAN模塊,上電后通過驅動程序控制其開始搜索WLAN網絡,如果搜索到合適的AP則自動接人并設定加密認證信息,以防止被攻擊;如果未搜索到,則定時重新搜索網絡。對于GPS模塊,冷啟動后,在4 800 bit/s默認波特率上輸入控制命令,調整波特率至9 600 bit/s,同時通過命令控制GPS在后面的工作中每隔一個固定時間間隔輸出一次定位信息,本軟件所設定的這個時間間隔為1 s。考慮到民用GPS在非差分模式下普遍的定位誤差在1 m~15 m,所以這個時間精度可以滿足絕大多數應用的要求。
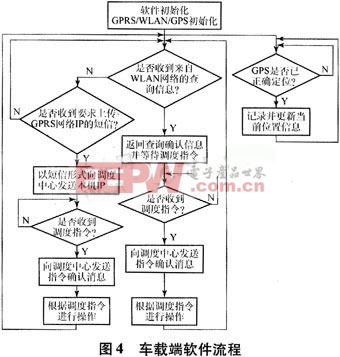
在初始化后,軟件則啟動兩個工作線程,分別用來處理GPS定位信息和無線網絡信息。其中處理GPS信息的線程首先要判斷是否已經有效定位。根據實測,如果 GPS模塊是初次使用或者放置較長時間后使用,此時模塊內部備電已耗盡,因此無法為冷啟動后的定位提供最近一次位置信息做參考,此時有效定位需要5 min~10 min。其他情況下冷啟動到有效定位大約需要10 s。有效定位后,此線程通過串口每秒接收一次GPS模塊輸出的當前位置、速度、時間等信息,并進行相應的處理和記錄。處理無線網絡信息的線程則主要負責協調GPRS和WLAN網絡,使得車載終端能夠有效、可靠地與管理調度中心進行通信。此線程首先掃描WLAN 網絡上與調度中心事先商量好的某個端口上有無查詢信息,若有,則返回查詢確認信息并等待實際指令;在收到指令之后首先向調度中心返回確認消息,然后再根據指令內容做相應動作。如果在查詢階段未找到合適的AP接人,則查詢GPRS模塊有沒有收到調度中心發來的短信。如無,則重新回到掃描WLAN網絡的狀態;如有,則說明調度中心需要與本終端通過GPRS進行通信,那么車載終端應該立即撥號連接上GPRS網絡,并將獲得的IP地址以短信形式回傳給調度中心。之后的通信流程與WLAN網絡類似,也是車載終端與管理調度中心通過指令信息和確認信息進行交互。
上述的軟件流程描述并未涉及到指令內容等具體業務,這是由于車輛管理調度系統的各個使用者和單位的具體業務會有很大的差異。針對這樣的差異,本系統提供了豐富的可供定制修改的空問,可以針對不同的具體業務有針對性地進行二次開發,同時可以擴展出很多實用的功能。例如,可以在車載終端上輸入本次行駛的目的地,通過終端與管理調度中心的交互,依托中心后臺功能強大的數據庫和電子地圖系統,可以對本次的行駛路線給出建議并直觀地以地圖形式顯示在車載終端的顯示設備上。如果將行駛過程中的位置信息以文件形式記錄并在合適時上傳到管理調度中心的PC機上,則可以結合電子地圖實現軌跡回放的功能,復現車輛行駛的實際路線,更好地對車輛進行管理。如果需要語音通信,則可以通過GSM模塊傳輸語音,實現車載電話的功能。
4 結束語
本文討論了基于GPRS/WLAN/GPS技術的無線車輛管理調度系統的設計方案,給出了系統總體框圖及其功能模塊,實現了系統的硬軟件。本系統的車載終端部分充分利用了WLAN的使用費低廉和數據傳輸速率高的優勢、GPRS網絡覆蓋范圍廣的優勢、GPS可實時定位和易于系統集成的優勢;采用高性能的嵌入式系統將各個功能模塊整合起來,實現了性能優秀、功能豐富而強大的車載終端。而管理調度中心采用PC機作為系統的服務器,擴展GPRS和WLAN模塊,在管理調度軟件的控制下完成命令和數據的收發,實現管理和調度功能;同時預留了豐富的功能擴展空間,可進行二次開發。
本系統的硬軟件技術指標已達到產業化的技術要求,設備工作穩定可靠,已經開始量產并使用在深圳鹽田港的運輸車輛管理調度系統中,車載終端數量已達到1000臺左右并仍然有不斷訂貨,具有很廣闊的市場前景!

pos機相關文章:pos機原理




評論