船載雷達回程誤差分析及消隙設(shè)計

根據(jù)電流指令控制要求設(shè)計產(chǎn)生偏置電流指令信號的電路,簡稱為力矩偏置電路。利用兩個電流環(huán)的負載電流指令提取Id1和Id2信號,通過偏置電路去控制偏置電流指令的形狀,可以使偏置電路成為一種函數(shù)發(fā)生器,使偏置電流指令成為負載電流的函數(shù)。本文引用地址:http://www.czjhyjcfj.com/article/194798.htm
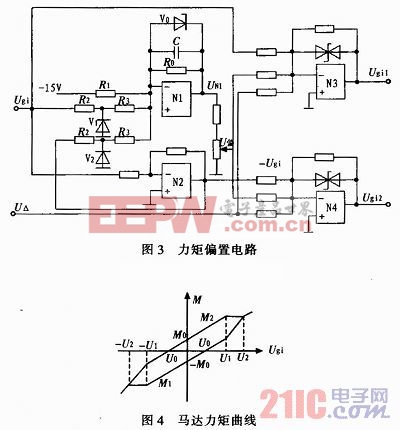
圖3是力矩偏置電路圖,Ugi為速度調(diào)節(jié)器輸出的負載電流指令,U偏是偏置電流指令,U△是差速振蕩抑制電流指令;N1為梯形函數(shù)發(fā)生器。調(diào)整電位器可以調(diào)整偏置力矩的大小。
3.2 消隙實現(xiàn)
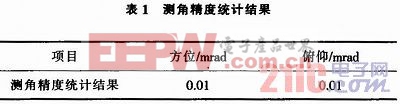
如果不考慮抑制差速振蕩的馬達力矩,則兩個馬達的力矩M1和M2與負載電流指令的關(guān)系如圖4所示。
圖4中,Ugi為速度調(diào)節(jié)器輸出的負載電流指令。
當Ugi=0時,M2=-M1=M0,M0稱為偏置力矩值。
當Ugi由0正向增加不太大時,保持M1、M2反向,仍能消隙,此時由2#馬達拖動負載和1#馬達前進。
當Ugi正向增加到U0時,M1=0,1#馬達在齒隙中游移。但2#馬達仍拖動負載,其齒輪箱不會出現(xiàn)齒隙,負載不會游移。
當Ugi>U0時,1#馬達穿過齒隙與2#馬達共同推動負載,但M2>M1。
當Ugi≥U1時,偏置力矩開始減小。
當Ugi≥U2時,偏置力矩完全消隙,兩臺馬達以相等的力矩推動負載。
可以看出,在一般工作情況下,負載至少和一個馬達之間無齒隙,不會游移。但是,當力矩快速反向而且其值又比較大時,仍有可能產(chǎn)生兩個馬達同時穿過齒隙的情況,但這種情況在實際使用時并不多。
4 結(jié)束語
雙馬達電消隙系統(tǒng)應(yīng)用于船載雷達,經(jīng)實踐檢驗效果良好。采用雷達跟蹤信標球方式進行測角精度統(tǒng)計,其結(jié)果如表1所示。
由上表可以看出,方位和俯仰測角隨機誤差滿足0.2 mrad的指標要求,大大提高了船載雷達的測量精度。
在精密雷達天線驅(qū)動系統(tǒng)中,雙馬達或多馬達驅(qū)動除了能實現(xiàn)電消隙、提高測角精度之外,在傳遞同樣力矩的前提下,雙馬達驅(qū)動比單馬達驅(qū)動所用的齒輪箱體積小,重量輕,易于加工制造;也就是說,在齒輪箱總體積相同的情況下,雙馬達驅(qū)動能提高傳動鏈的剛度。




評論