基于LPC2119的RS485-CAN總線轉換器設計

RS485是工業控制領域中一種傳統的總線技術。然而,隨著工業控制的復雜度提高,RS485總線在系統容量,通訊距離,不能支持多主結構等方面的缺陷開始逐漸顯現。
CAN總線是從20時紀80年代初發展起來的一種新型現場總線技術,它的總線長度最遠可達10千米(速率5Kbps以下),數據傳輸速率最高可達1Mbps(通訊距離40米以內)。它在多主方式下工作,不分主從;節點數的數目主要取決于總線驅動電路,目前可達110個。采用非破壞總線仲裁技術,即使網絡負載很重也不會出現網絡癱瘓現象。此外,CAN的每幀信息都有CRC校驗和其它檢錯措施,有很好的檢錯效果[1]。
由于CAN總線具備以上優點,它目前已經被廣泛應用到汽車電子、電力系統、航空工業和自動工作等領域中,并形成了國際標準,被公認為幾種最有前途的現場總線之一[2]。
然而,由于RS485和CAN總線的電壓不兼容,幀格式也不相同,因此,大量現有的RS485總線設備若要在CAN總線上使用,就必須使用RS485-CAN總線轉換器。
2.系統硬件設計
2.1 系統硬件原理框圖
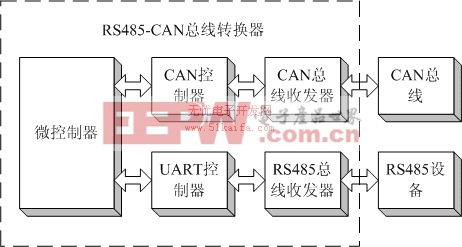
圖1 :RS485-CAN總線轉換器原理框圖
RS485-CAN總線轉換器由微控制器、CAN總線控制器、CAN總線收發器、UART控制器、RS485總線收發器組成,其原理框圖如圖1所示。
微處理器通過對CAN控制器和UART控制器的操作,經過CAN總線收發器和RS485總線收發器的電平轉換,分別實現了在CAN總線上接收和發送數據以及對RS485設備上數據的讀寫。
當要向RS485設備寫數據時,就將要寫的數據發送到CAN總線上。通過CAN總線收發器的電平轉換之后,CAN控制器將收到一幀CAN數據,當確認這幀數據是發往本節點時,微控制器就將數據發送到UART控制器上,通過RS485總線收發器傳送到RS485設備上。
RS485設備發送數據時,數據將通過RS485和UART控制器傳送到微處理器上。微處理器就將這個數據通過CAN控制器和CAN總線收發器發送到CAN總線上,讓其它節點接收。
2.2 系統電路設計
本文介紹的RS485-CAN總線轉換器選用飛利浦公司的LPC2119作為系統的微控制器。LPC2119是一款集成有CAN和UART控制器的ARM7核的工業級單片機。具有低功耗和穩定可靠的特點[3]。由于LPC2119本身集成了CAN和UART控制器,因此只需再增加一塊CAN總線收發芯片和一塊RS485總線收發芯片,以及一些外圍器件即可完成系統的電路搭建。
CAN總線收發器選用TJA1050,該芯片是飛利浦公司生產的、用來替代82C250的高速CAN總線收發器。除了保留82C250的主要特性外,由于TJA1050采用了先進的SOI(silicon on insulator)技術,因此抗電磁干擾性能得到大幅提高。[4]
RS485總線收發器選用了Sipex公司的SP485E,該芯片是一半雙工收發器,具有增強型ESD性能,可承受15kV的人體放電模式和接觸放電模式。系統電路圖如圖2所示:

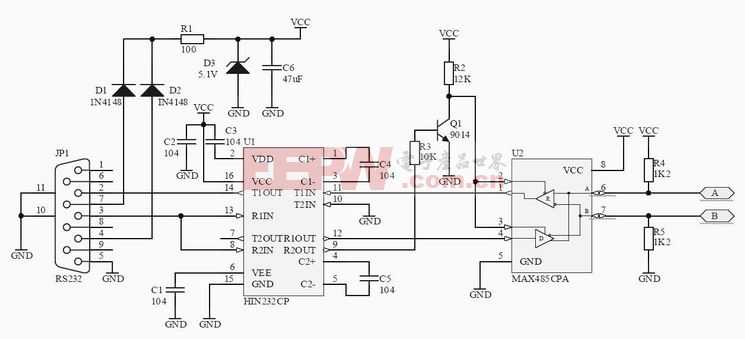
圖2: 系統電路圖

圖3: 微控制器初始化流程圖
圖中,TD1和RD1分別為LPC2119內建CAN控制器的發送和接收引腳,TXD0和RXD0分別為LPC2119內建UART控制器的發送和接收引腳。TJA1050的S引腳是靜音模式選擇引腳。S引腳高電平時,TJA1050進入靜音模式,發送器完全禁能,執行只聽功能。SP485E的/RE引腳和DE引腳分別是接收使能和發送使能,一個是低電平起效,一個是高電平起效。由于SP485E是一半雙工的收發器,因此可以把/RE引腳和DE接在一起,由微控制器的一個IO來控制SP485E是處于接收狀態還是發送狀態。
3.系統軟件設計
系統的軟件設計主要包括三大部分:系統初始化程序、RS485設備數據發送中斷程序,RS485設備數據接收中斷程序。
3.1 系統初始化程序
系統的初始化包括微控制器的初始化、UART控制器初始化和CAN控制器初始化。微控制器初始化的流程可見圖3(源代碼略)。




評論