基于多Agent機器人系統的圖書歸類解決方案

摘 要:現代圖書館的藏書量已成為衡量一個圖書館水平的重要指標之一,而藏書量的增多也意味著圖書館日常管理任務的加重,圖書管理人員要耗費巨大的精力去歸類、整理圖書。移動機器人和多Agent 技術的迅猛發展給這個亟待解決的問題帶來了一種新的、可能的解決途徑。我們提出一種基于多Agent 技術的機器人軟件實現模型,該機器人能自動識別、歸類圖書,并通過改進BUG 算法導航適宜的行走路線,快速、準確地完成圖書館大量書籍的分類整理工作,極大地簡化了傳統的人工操作,減輕了管理人員繁重的重復性勞動。
本文引用地址:http://www.czjhyjcfj.com/article/185707.htm隨著科學的進步,現代圖書館的藏書量和報刊雜志的種類急劇增加。隨之而來的日益繁重的管理任務,僅憑傳統的人工操作,不僅耗費越來越多的人力、物力、財力,也降低了圖書管理工作的可靠性,特別是有些讀者借了多本書后隔天就馬上歸還,這無形中加重了圖書館理人員的勞動量,因而,讓機器代替人類實現圖書館管理的工作是圖書館管理的必然發展趨勢。
智能機器人是一類能夠通過傳感器感知環境和自身狀態,實現在有障礙物的環境中面向目標的自主運動,從而完成一定作業功能的機器人系統。近年來,機器人技術在工業、農業、航天及空間探測等許多領域都起到了重要的作用,同時又顯示了廣泛的應用前景,成為人工智能學術界研究和關注的熱點問題。而Agent 是處在某個環境中的計算機系統,該系統有能力在這個環境中自主行動以實現其設計目標。多Agent 系統是多個可運作的Agent 的有機結合,通過多Agent 之間的交互將一個復雜的問題簡單化。
將多Agent 技術應用于移動機器人中使得機器人具有更高的智能性,實現自動感知環境變化、智能識別、歸類、傳送圖書,讓機器完成重復、繁重的體力勞動,減輕了圖書館工作人員的工作壓力,實現圖書館的智能化。
1 Agent與多Agent的機器人系統基本理論
1.1 Agent 理論
在人工智能研究的進程中,研究者們逐漸認識到應該把人工智能各個領域的研究成果集成為一個具有智能行為概念的人,更重要的是人們認識到了人類智能的本質是一種社會性的智能,人類絕大部分的活動都涉及多個人構成的社會團體,大型復雜問題的求解需要多個專業人員或組織協作完成。人最重要的和最多的智能是在由眾多個體構成的社會中進行各種活動時體現出來的。協作、競爭、談判等等是人類智能行為的主要表現形式。要對社會性的智能進行研究,構成社會的基本構件人的對應物Agent理所當然地就成為人工智能研究的基本對象。
一般認為,Agent 是一種處于一定環境下包裝的計算機系統,為了實現設計目的,它能在那種環境下靈活地、自主地活動。雖然目前還沒有一個大家都能接受的關于Agent 的定義,但幾乎所有被稱為Agent的軟件或硬件系統都具有以下的特征: 自治性(Autonomy ) 、社會性(Social Ability) 、反應性(Reactivity)、主動性(Proactivity)、智能性(Intelligence )、合作性(Collaboration)。
1.2 基于多Agent 的機器人系統及其任務模型
多機器人系統并非一個簡單的多機器人組合系統,而是一個以分布式人工智能為指導,結合計算機、分布式控制、多傳感器技術和理論,將多個機器人組織而成的分布式智能系統。多機器人系統在系統功能、并行性、柔性、穩定性以及容錯性等方面具有單機器人系統不可比擬的優勢,其正得到深入研究和廣泛應用。多個機器人在共同的復雜環境中協同工作時,不僅和環境之間有復雜的交互作用,而且相互之間既有分工又有協作,既有合作又有競爭。多機器人系統的研究存在許多與單機器人系統所不同的問題:(1)如何在各機器人間表達、描述問題,分解和分配任務;(2)如何使機器人間相互通訊和相互作用;(3)如何保證各機器人行為協調一致;(4)機器人間如何識別和解決沖突等等。
這些問題主要涉及分布式問題的求解,用傳統的集中控制理論和機器人理論已難以解決。當前MAS理論的發展及其在分布式系統中的應用給多機器人系統的研究帶來了新的思路,并已在一些試驗系統的開發中得到了驗證。
1.3 機器人Agent 的任務模型
機器人的行為總是帶有一定目的性,即與一定的任務或任務目標相聯系任務目標。根據其是抽象的還是具體的,可分為隱式任務和顯式任務兩類:隱式任務一般是指可用自然語言描述的,沒有明確數學形式的抽象任務,例如,將圖書放到書柜上,或放到推車.顯式任務則一般是具有精確的數學形式描述或量化指標的具體任務,如移動到目標點(3, 7),或保持加工精度為土0. 003mm .可以看到,隱式任務一般是高層任務指令,而顯式任務一般是底層具體任務。隱式任務需要結合環境信息以及機器人的自身狀態,轉化為顯示任務序列加以實現。以機器人取書為例,假設機器人位置為(5, 8},書位置為(32, 36),推車位置為(67, 57)。將書放入推車為隱式任務目標,其可分解為顯示任務目標序列:移動到位置點(32,36),夾持位置點在(32, 36)的書,移動到位置點(67,57),放置書到位置點在(67, 57)的推車.一般而言,機器人Agent 的任務可用下式表示:
Task=(Goal,Precondition,Body,Effects,Setting)
其中Goal 表示任務task 的目標,一般可用自然語言描述;Precondition 表示任務task 實現所需的前提條件;Body 表示任務task 的子任務序列或顯式目標序列;Setting 表示任務task 的附加約束條件集;Effects 表示任務task 實現后對環境的效果集。
隱式任務在分解轉化為顯式任務時,也可能生成某些中間隱式任務,從而形成機器人任務分解的一種與/或樹結構。其中與表示上層任務目標通過實現所有下層任務目標才能完成,或表示上層任務目標可通過選擇實現下層的某個任務目標加以完成。一般而言,樹狀結構的最底層分支的端點都是機器人可直接執行的顯式任務目標,并且是與樹結構,即顯示任務目標序列。
2 基于多Agent的機器人系統的體系設計
2.1 環境設置
本系統為了便于機器人識別,將圖書館中所有的書柜用阿拉伯數字進行編號,即每一書柜對應相應的標簽編碼段,跟圖書館中每個柜上設置放置的圖書數目一致,并將其存入規則庫中。推車設計成具有若干個格子,且設定每個格子只放一本書,便于機器人區分某本書的在推車上的具體位置,推車上的格子也以阿拉伯數字標識,便于機器人存儲、記憶。
2.2 系統結構
本系統利用多Agent 系統減輕人工分類、擺放圖書的工作量,其工作流程如圖1 所示:
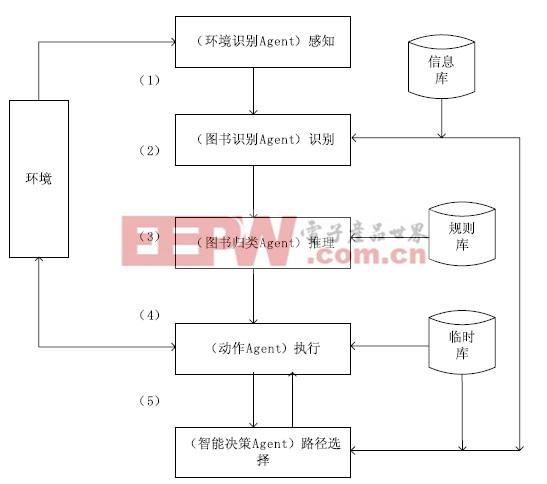
圖1 系統體系結構。
(1)當機器人的機械手拿一本圖書時,機器手上的自動識別系統即帶有傳感器的環境識別Agent 立即感知環境變化,且獲取圖書條形碼信息,并將這些信息傳遞給圖書識別Agent.這一過程主要是實現從環境狀態(E)到感知(Per)的映射(函數see 的輸出是一種感知,即感知的輸入):see : E--> Per.
(2)信息庫包括了圖書信息的集合和圖書館的電子地圖,存儲著所有圖書條形碼的信息、書名及其圖書標簽和圖書館電子地圖。通過傳感器識別出條形碼,圖書識別Agent 接收條形碼信息,將信息分解,并跟信息庫中已有的條形碼進行模式匹配,找到符合的樣本,返回圖書的基本信息,用函數book(館號,條形碼,條形碼號,書名,標簽)表示,其中標簽指的是在圖書館里的位置編碼,分為2 大部分,前一部分字母遵循中國圖書館圖書分類法,指出圖書的類別,而后一部分則為每個圖書館各自的編碼方式,存儲著每本圖書在館內的具體位置。并將這個函數傳遞給圖書歸類Agent.
(3)規則庫是規則的集合,存儲著中國圖書館圖書分類法及本地圖書館子規則。
圖書歸類Agent 接收函數book,將對應的標簽跟規則庫中的規則進行比較得到圖書在館中的位置,并將其分解為某類圖書的某個具體書柜,用函數position(編碼號,書柜號)將位置函數傳遞給動作Agent.
(4)動作選擇函數獲得推理結果實現從內部狀態到動作(Ac)的映射:action:I--> Ac.動作Agent將圖書放入推車的空格子中,并在臨時庫中記錄每本書的書柜號和推車格號,同一書柜號的圖書可以記錄在一條記錄中,在原先記錄尾部追加其推車格號即可,那么機器人可將推車中同一個書柜的圖書一次性擺放,不需下次折回。臨時庫見表1 所示。
表1 臨時庫表一

(5)當推車上的格子都擺滿后,動作Agent 傳遞消息給智能決策Agent 圖書已擺滿,則智能決策Agent查看臨時庫中的各個書柜號,根據信息庫中已存儲的圖書館的電子地圖即各個書柜的擺放次序利用改進BUG 算法計算出各個目的地的優先次序和機器人的行走路徑,并指導動作Agent 到各個目的地完成擺書操作,最后回到還書處等待下一次的擺書動作。
3 關鍵算法分析
3.1 圖書歸類
依據圖書館給圖書分類編碼的標準,參照中國圖書館圖書分類法,因為國家圖書館圖書分類法,從首字符可以分出大的圖書所屬類別,從一級類別中再細分,部分首字符,例如:E、U、V 就代表一類,不需要再細分,而有些要細分出來,則需要首四位字符的判斷才能分析出來,更特別的是審計類編碼規則,要有前六位才可以分辨出來。據此我們設計圖書分類編碼,共12 位,由26 個大寫字母和十個數字0~9 組成,前四位代表圖書的類別,如果按照中國圖書館分類法,字符不足四位的用通用字符*補足,例如:U 代表交通運輸類,一本書的分類編碼前四位可以設計為U***;TP1 代表自動化基礎理論,該類別一本書的分類編碼前四位可以設計為:TP1*,后8 位按照各個不同圖書館的不同要求進行編碼,從而根據類別和后八位的編碼確定某本書所在的碼段,接著確定具體的位置和所在柜。
我們根據該編碼規則來設計圖書分類規則庫。我們設計四個子規則庫:
唯一字符規則庫:
r1: IF 第一個字符是U/E/P/Q/R/V THEN 該本書是所對應的某一大類。
兩個字符規則庫:
r1: IF 第一個字符是某個字母 THEN 該本書是某種一級類;
r2: IF 第二個字符是某個字母或數字 THEN 該本書是二級類;
三個字符規則庫:
r1: IF 第一個字符是某個字母 THEN 該本書是某種一級類;
r2: IF 第二個字符是某個字母或數字 THEN該本書是某二級類;
r3: IF 第三個字符是某個字母或數字 THEN該本書是某三級類;










評論