基于STC12C5A60S2的教育機器人的設計與實現

摘要:主要介紹以STC12C5A60S2單片機為核心的教育機器人設計,闡述了教育機器人的硬件電路設計、軟件模塊以及控制算法設計。系統設計的紅外光電檢測陣列和模糊自整定PID控制器,使教育機器人在行走時更平穩,且控制方法簡單、實用。該系統可用于無人駕駛、自動探測等人工智能等領域。
關鍵詞:STC12C5A60S2;紅外光電檢測陣列;模糊自整定PID控制
0 引言
目前許多高等教育院校采用教育機器人進行課堂教學和培養學生的創新能力。本文設計的教育機器人通過紅外光電傳感器陣列檢測路面信息并利用模糊自整定PID算法將采集的路面信息和電機運行數據進行實時處理,實現教育機器人的智能巡航并將機器人的狀態顯示輸出。
1 機器人的組成及工作原理
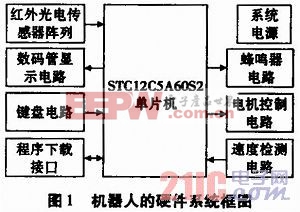
機器人由硬件和軟件兩部分組成。采用STC12CSA60S2單片機作為系統控制的核心部件,完成路面信息檢測、直流電機控制、電機轉速檢測、數碼管顯示、蜂鳴器報警以及鍵盤輸入等功能,硬件系統框圖如圖1所示。
軟件部分主要完成路況檢測、PID電機控制、輸入輸出人機接口,可實現各種機器人巡航動作、智能循跡等功能。
2 STC12系列單片機
本文采用的STC12C5A60S2單片機是是宏晶科技生產的STC12系列單片機。該單片機是單時鐘/機器周期(1T),具有高速、低功耗、超強抗干擾和無法解密諸多優點。指令代碼完全兼容傳統8051,速度快8-12倍。工作電壓為3.3 V~5.5 V(5V單片機),有6個16位定時器,兼容普通8051的定時器或4個外部中斷,具有看門狗和EEPROM功能,并且內部集成MAX810專用復位電路。
3 硬件設計
3.1 系統電源
由于電機在啟動瞬間電流很大,要求電源有足夠大的驅動能力,因此系統采用雙電源供電方式。利用LM7805將12 V鋰電池組電壓轉換為5 V穩壓電源給單片機最小系統電路、路面檢測電路、數碼管顯示電路和電機測速電路供電。而電機驅動電路直接由另外一組鋰電池輸出的12 V電壓直接供電。
3.2 電機驅動電路
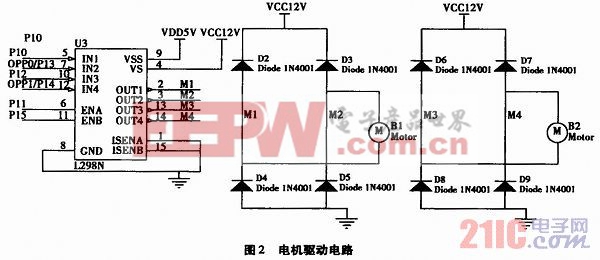
本系統使用的直流電機額定電壓為12 V,額定轉速為300 rpm。電機驅動電路采用專用芯片L298N作為電機驅動芯片。用該芯片作為電機驅動,不僅穩定性好,大大地簡化驅電路,而且驅動能力大,有利于電機轉速的穩定。電機驅動電路如圖2所示。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
蜂鳴器相關文章:蜂鳴器原理 溫濕度控制器相關文章:溫濕度控制器原理








評論