太陽能動力昆蟲機器人DIY-可愛的蚊子

在完成上一個以簡單電學電路為基礎的避障機器人項目后,我們將進行第三個PVC機器人項目制作。這是一個比較特殊的機器人,首先其控制電路比上一個項目稍微復雜了一點,是以電子元器件組成的;其次這個機器人不再以傳統電池作為電源,而是采用了綠色環保的太陽能作為能源;另外,這個項目的動力驅動方式比較特別——以震動的方式進行挪動位移。
本文引用地址:http://www.czjhyjcfj.com/article/164975.htm本項目主要面向對電子電路有點陌生的初學者,能夠讓大家初步掌握以電子元器件為基礎的電子制作,了解基礎的電子知識,理解簡單的電路原理,同時掌握基本的電路焊接技巧。如果是對此已經非常熟悉的朋友,可以跳過本章節。

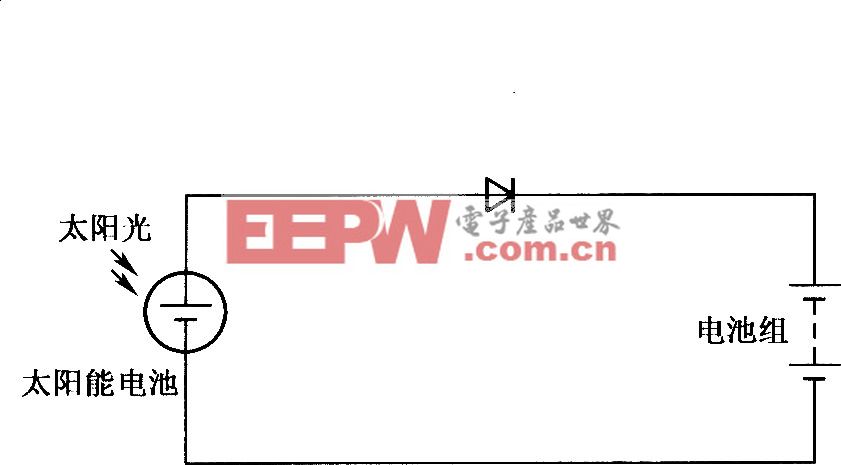
這是一個的以太陽能為能源的特殊移動機器人,即以太陽能電池為電源,以偏心擺錘馬達的震動效果作為挪動的動力。
以下為效果視頻,前一段是在燈光(白熾燈)下進行測試的效果,后面一段為在陽光下的效果。
因為體型相象,以及震動時的嗡嗡聲,我給本項目的太陽能動力機器人再起一個外號——曬太陽的蚊子,呵呵。
本項目套件的淘寶地址:http://item.taobao.com/item.htm?id=9284864243
一、基本原理
1.1、驅動原理
1.2、機械結構
1.3、電路原理
1.3.1、電路符號
1.3.2、電子元件 (電阻、電容、二極管、三級管、震動馬達、太陽能電池)
1.3.3、原理分析(常規分析、類比分析)
二、準備工作
三、制作過程
3.1、電路焊接
3.2、電路測試
3.3、結構制作
3.4、安裝電路板
3.5、震動馬達
3.6、太陽能電池
3.7、電源開關
3.8、整機組裝
3.9、整機效果
3.10、結構完善
四、效果展示
五、常見問題
六、項目總結
一、基本原理 本項目的太陽能機器人采用太陽能電池作為電源,依靠帶偏心擺錘的震動馬達發出的震動波進行移動。 1、驅動原理 本項目機器人的動力來自于震動馬達,這和我們的0號機器人的驅動原理是一樣的,具體可以參見這里:PVCRobot 0號機器人驅動原理 這里所謂震動馬達,其實就是我們手機中實現震機的震動器,其原理就是通過旋轉的馬達帶動一個位于偏心輪上的擺錘,由于擺錘的重心是位于旋轉的軸上的一邊,在馬達轉動的過程中,就會由于擺錘的重量不斷循環的在轉軸的周圍產生一個離心的外力(即:交替忽上忽下、忽左忽右的擺動),從而導致馬達的震動。

下圖中左邊的兩個震動馬達是在普通馬達上接了偏心擺錘,而右邊扁平的其實把馬達和擺錘融為一體了,效果其實相當于左邊馬達豎著放而已,只不過結構更緊湊了。

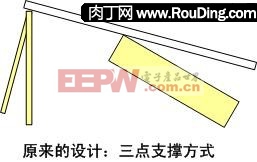
2、機械結構 本項目機器人的結構最開始在設計的時候是采用“三點支撐”的方式,即:一對前腳,然后尾部(電子元件:電解電容)著地。
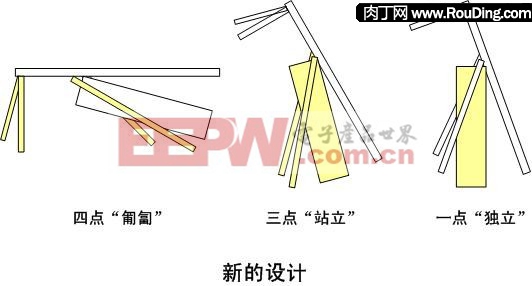
后來在實際測試的時候,發現由于尾部著地點較遠,導致重心比較靠中心,從而整體平衡較穩定,在震動的時候挪動的幅度不夠。后來的設計改為再增加兩只后腿,既可以采用三種支撐方式:
1)“四點支撐”:四腳匍匐,較穩定,移動幅度小;
2)“三點支撐”:后腳站立,較穩定,移動幅度較大;
3)“一點支撐”:尾部獨立著地,很不穩定,移動幅度最大。
在上面的視頻中也演示了這三種不同的情況。
也就是加了兩只后腿,看起來就像蚊子了,本機器人“蚊子”的外號也因此而得名。
在重量一定的情況下,越是不穩定的結構,在震動的影響下移動的幅度越大。不過由于震動采用的器件是帶擺錘的馬達,在震動的過程中會有一個旋轉的趨勢,如果采用不穩定的支撐結構時,容易發生原地轉動。
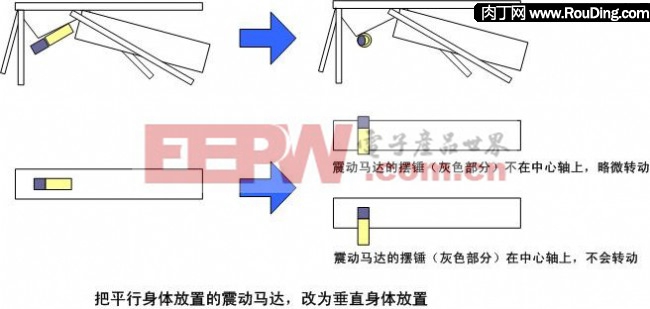
要改變這個情況,則可以:調整震動馬達的安裝方位
如果把震動馬達從現在平行身體(一字型)的方向改為垂直身體(十字型)的方向安裝,則旋轉的趨勢就會變成向前或者向后的動力,震動時機器人就會由“打轉”變為“向前”或“向后”移動。
如果要改變前進或者是后退,則只要改變馬達的電源正負極,即改變馬達是順時針還是逆時針旋轉;如果震動馬達的擺錘位置不是正好位于機器人身體的中心軸,則還會有略微的轉動,但這樣動起來的效果更好,還帶一點轉彎。
另外,這里提一下,如果改用扁平震動器,則不可避免的一定會出現以上所說的打轉的狀況,因為扁平震動器其實相當于上面那種震動馬達以轉軸垂直地面的豎著放的情況,而扁平震動器由于形狀所限又不能隨意調整安裝方位(只能扁平的水平貼在物件的表面),即無法像上面所說情況那樣通過改變方位去化解轉動的趨勢。當然,如果專門追求轉動的效果那又是另外的一種思路。

DIY機械鍵盤相關社區:機械鍵盤DIY





評論