全方位移動機器人模糊PID運動控制研究

摘 要:通過對足球機器人運動學模型的分析,考慮到系統的時變、非線性、干擾大等特點,以全向移動機器人為研究平臺,提出一種將模糊控制與傳統PID控制相結合的方法,應用到足球機器人的運動控制系統中。針對足球機器人運動控制中的重點問題,著重提出了基于模糊控制的PID控制器中三個參數的動態調整方法。實驗表明,該控制器能夠很好地改善控制系統對輪速的控制效果。
關鍵詞:移動機器人;運動控制:四論全向機器人:模糊PID
0 引 言
移動機器人是一個集環境感知、動態決策、行為控制與執行等多種功能于一體的綜合系統,其運動控制是移動機器人領域的一個重要研究方向,也是移動機器人軌跡控制、定位和導航的基礎。傳統的運動控制常采用PID控制算法,其特點是算法簡單,魯棒性強,可靠性高,但需要精確的數學模型才對線性系統具有較好的控制效果,然而它對非線性系統的控制效果并不非常理想。模糊控制不要求控制對象的精確數學模型,因而靈活、適應性強。可是,任何一種純模糊控制器本質上是一種非線性PD控制,不具備積分作用,所以很難在模糊控制系統中消除穩態誤差。針對這個問題,采用模糊PID控制方法,將模糊控制器和傳統的PID控制相結合,使其既具有模糊控制靈活、適應性強的優點,又具有PID控制精度高的特點。
1 全方位移動機器人運動學分析
研究的是由第二炮兵工程學院自主研制的全自主移動機器人平臺――東風一Ⅱ型足球機器人。東風一Ⅱ型機器人采用了四輪全向移動的運動方式,具有全向運動能力的系統使機器人可以向任意方向做直線運動,而之前不需要做旋轉運動,并且這種輪系可滿足一邊做直線運動一邊旋轉的要求,以達到終狀態所需要的任意姿態角。全向輪系的應用將使足球機器人具有運動快速靈活,控球穩定,進攻性強,以及易于控制等優點,使機器人在賽場上更具競爭力。
1.1 全向輪
該機器人采用在大輪周圍均勻分布小輪子的全向輪,大輪由電機驅動;小輪可自由轉動。這種全方位輪可有效避免普通輪子不能側滑所帶來的非完整性約束,使機器人具有平面運動的全部三個自由度,機動性增強。基于以上分析,選擇使用這種全向輪。
1.2 運動學分析
在建立機器人的運動模型前,先做以下假設:
(1)小車是在一個理想的平面上運動,地面的不規則可以忽略。
(2)小車是一個剛體,形變可以忽略。
(3)輪子和地面之間滿足純滾動的條件,沒有相對滑動。
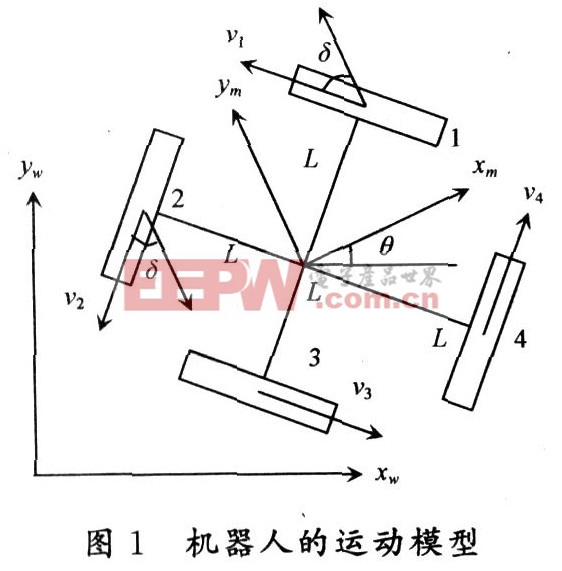
全方位移動機器人由4個全向輪作為驅動輪,它們之間間隔90°均勻分布(如圖1所示),其簡化運動學模型如圖6所示。其中,xw-yw為絕對坐標系;xm-ym為固連在機器人車體上的相對坐標系,其坐標原點與機器人中心重合。θ為xw與xm的夾角;δ為輪子與ym的夾角;L為機器人中心到輪子中心的距離vi為第i個輪子的沿驅動方向的速度。
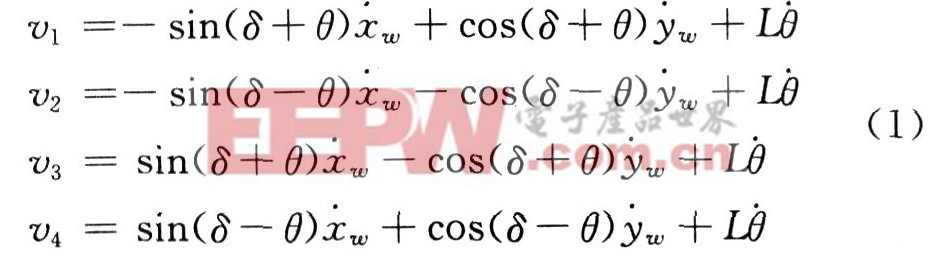
可求出運動學方程如下:










評論