模糊PID控制器的設計與仿真研究

摘要:本文把MATLAB中的Fuzzy Toolbox和SIMULINK結合起來,討論了模糊邏輯控制器的設計與仿真問題,以實現PID控制器參數的自調整,提高系統(tǒng)控制的精度。仿真結果表明,模糊PID控制器明顯改善了系統(tǒng)的動態(tài)性能和穩(wěn)態(tài)性能,使系統(tǒng)控制達到了滿意的效果,對系統(tǒng)控制和系統(tǒng)的調整具有一定理論價值。
關鍵詞:模糊PID控制器;SIMULINK;參數調整;仿真
0 引言
在工業(yè)生產過程中,許多被控對象隨著負荷變化或干擾因素的影響,其對象特性參數或結構發(fā)生改變,而且現代工業(yè)生產過程往往都是時變、非線性、大時滯的復雜系統(tǒng),系統(tǒng)的精確數學模型往往難以獲得,經典的PID控制方法遇到了難以克服的困難,而且在實際生產現場,由于常規(guī)PID參數整定方法繁雜,其參數整定不良、性能欠佳,對運行工況的適應性差。
人們一直在尋求PID參數調整的自適應技術,以適應復雜的工況和高指標的控制要求。隨著控制理論和計算機技術的發(fā)展,人們利用人工智能的方法將操作經驗作為知識存入計算機中,根據現場實際控制情況,計算機能根據工況和控制要求自動調整PID參數,實現PID的智能控制。本文將模糊控制與PID控制結合起來,構造自適應模糊PID控制器,實現PID參數的最佳調整,以增強系統(tǒng)對不確定因素的適應性。
1 自適應模糊PID控制器的設計
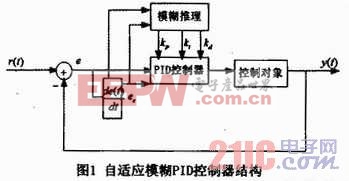
以常規(guī)PID控制為基礎,采用模糊推理理論,將被控制量的偏差e和偏差變化率ec作為二維模糊控制器的輸入變量,通過模糊控制器的輸出變量,利用模糊控制規(guī)則在線調整PID各參數,便構成了自適應模糊PID控制系統(tǒng)。自適應模糊PID控制器結構框圖如圖1所示。

pid控制器相關文章:pid控制器原理








評論