模糊PID控制器的設(shè)計(jì)與仿真研究

2 模糊PID控制器的控制規(guī)則設(shè)計(jì)
通常,PID控制器的控制算式為:
針對(duì)不同的偏差e和偏差變化率ec,被控過程對(duì)參數(shù)kp,ki,kd的自整定要求滿足以下規(guī)律:
(1)當(dāng)偏差|e|較大時(shí),應(yīng)取較大的kp和較小的kd,以加快系統(tǒng)的響應(yīng)速度,提高系統(tǒng)的靈敏度;
(2)當(dāng)偏差|e|中等時(shí),應(yīng)取較小的kp以及適當(dāng)?shù)膋i和kd,以使系統(tǒng)具有較小的超調(diào)量,獲取系統(tǒng)良好的相對(duì)穩(wěn)定性:
(3)當(dāng)偏差|e|較小時(shí),應(yīng)取較大的kp和ki以及適當(dāng)?shù)膋d,以避免在平衡點(diǎn)附近出現(xiàn)震蕩,使系統(tǒng)具有較好的穩(wěn)定性。
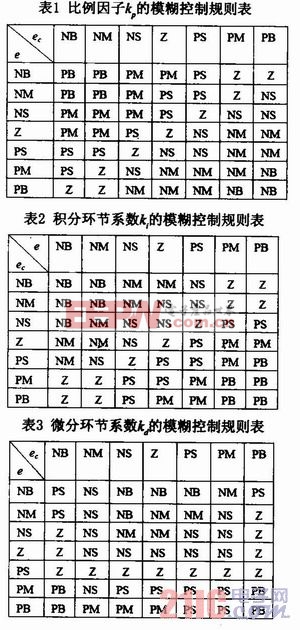
模糊控制設(shè)計(jì)的核心是總結(jié)工程設(shè)計(jì)人員的技術(shù)知識(shí)和實(shí)際操作經(jīng)驗(yàn),建立合適的模糊控制規(guī)則表,得到針對(duì)參數(shù)kp,ki,kd分別整定的模糊控制表,如表1所示。本文引用地址:http://www.czjhyjcfj.com/article/162201.htm

pid控制器相關(guān)文章:pid控制器原理








評(píng)論