基于模糊控制的水下潛器沉浮控制方法

2 自適應(yīng)模糊控制方法
基于自適應(yīng)模糊控制的水下潛器沉浮控制過程,如圖3所示。本文引用地址:http://www.czjhyjcfj.com/article/161986.htm
為它的2個輸入,以電磁閥的變化μ作為控制量,將和控制量μ的數(shù)量范圍劃分為5個用語言變量表述的模糊集,即負大(NB)、負小(NS)、零(0)、正小(PS)、正大(PB)。而E和的數(shù)量范圍亦劃分為5個語言變量表述的模糊集,即負大(NB)、負小(NS)、零(0)、正小(PS)、正大(PB)。
2.2 隸屬函數(shù)
輸入變量的隸屬函數(shù)為梯形隸屬函數(shù)和三角形隸屬函數(shù)。下面給出的是控制變量的隸屬函數(shù),輸入變量的隸屬函數(shù)類同。
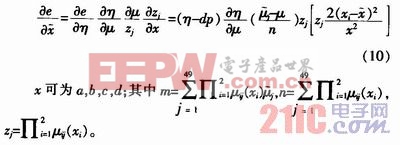
修正。取誤差函數(shù):
![]()
其中,η(t)為深度H,dp為控制目標。
采用EBP算法(加慣性項)對隸屬函數(shù)的參數(shù)進行修正,得如下公式:
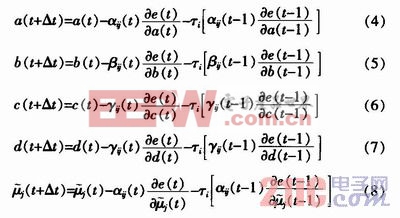
其中,αij、βij、γij均為學(xué)習(xí)速率,τi為慣性系數(shù)。
上述3式中右邊第3項為慣性項,因為在EBP算法中,如果學(xué)習(xí)速率取的小學(xué)習(xí)過程將很慢,而大的學(xué)習(xí)速率又可能導(dǎo)致學(xué)習(xí)過程的振蕩,另外學(xué)習(xí)過程可能收斂于局部極小點或在誤差函數(shù)的平穩(wěn)段停止不前。慣性項的引入可以提高收斂速度和改善動態(tài)性能(即可以抑制寄生振蕩)。
















評論