基于ATmega32的遙控采摘機器人設計

摘要:針對機器視覺采摘機器存在的技術不成熟,成本過高等不足,提出采用人工操控的半自動采摘技術,并進行了探索研究。設計了一款模擬采摘機器人,機器人以履帶底盤為基座,三自由度機械臂,紅外遙控操作。硬件電路以ATmega32為系統控制核心,采摘機器人的動作采用BL35P12為核心紅外遙控控制。系統軟件基于AVR Studio4開發環境,實現對機械臂運動的全方位精確控制。采摘機器人采用模塊化設計,抓取速度快,成本低,易于實現,可擴展性強。
關鍵詞:采摘機器人;三自由度;ATmega32;紅外遙控
目前采摘機器人研究重點大多集中在視覺系統對果實目標的識別和定位上,利用攝像頭獲取果實圖片信息,通過復雜的圖像信號處理算法,編制程序進行邏輯處理,實現果實判斷,發出采摘命令。這種方式機器人具有較好的自動識別的能力,并且能夠自動采摘,無需人工操作,是農業機器人最理想的方式,但目前相關技術不夠成熟,投入較高。本設計采用人機協作方式,即采用人工判別果實,機器人負責摘取。通過人工現場觀察判斷,使用無線遙控遠程控制機器人動作。這種方式現有技術比較成熟,使得機器人研發周期縮短,造價成本低,雖然不能夠完全代替人勞動,但能夠降低人的勞動強度,對于目前中國農業的水平,能夠更好的普及。
針對以上存在的問題,本文設計了一款基于ATmega32的模擬采摘機器人,能實現人工操作的機械采摘,通過紅外遙控控制機械臂使末端夾持器伸到目標果實所在位置,進行抓取工作,完成采摘任務。
1 機器人總體方案設計
機器人設計融合了機械制造技術,電子電路技術,自動控制和傳感器檢測技術,以及軟件開發編程等。本文中機器人的傳感器和紅外遙控器的信號輸人到主控制板,主控制板處理后輸出控制三自由度機械臂和履帶底盤結構的機器人,紅外遙控機械臂,實現抓取果實。機器人結構框圖如圖1所示。
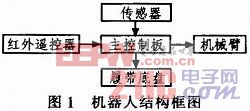
機器人的控制模式為無線控制機器人采用直接操縱方式,操縱者通過遙控器向遠端發送操縱指令。控制機器人的車體的前向運動,左右轉向,三自由度的機械臂的運動,及夾持器旋轉、張與合。文中設計的機器人具有結構簡單,功能豐富,可擴展性強等特點。
2 機械裝置設計
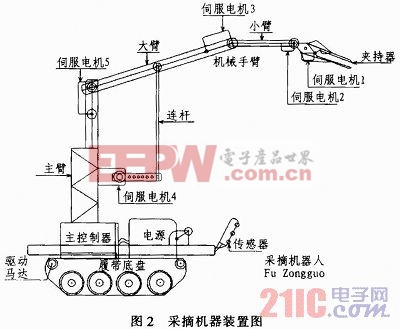
遙控采摘機器人機械裝置圖如圖2所示,主要包括兩部分:兩自由度的移動載體和三自由度帶夾持器的機械臂。機器人主體使用網孔鋁板材料和工程塑料組裝成機器人機體,結構輕巧,方便在車體上增加模塊。移動載體為履帶式底盤,加裝了主控電路板、采摘輔助裝置、多種傳感器、電源模塊等。履帶底盤每一側采用雙履帶結構,使用4臺FAULHABER電機驅動。機械臂固定在履帶式行走機構上,機械臂上的伺服電機使用扭矩10 kg/cm的MG995金屬齒輪舵機,機械臂上伺服電機1控制夾持器的張開和合并,使得夾持器能夠完成采摘和剪切等任務。伺服電機2控制夾持器的左右旋轉。伺服電機3控制小臂上下運動,伺服電機4通過連桿和伺服電機5聯合驅動大臂上下運動。









評論