除塵競(jìng)賽機(jī)器人及其控制策略研究
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
摘要:采用嵌入式微處理器、傳感器和直流電機(jī)控制技術(shù),設(shè)計(jì)基于16位高性能微處理器MSP430的除塵競(jìng)賽機(jī)器人。MSP4130F5418微處理器通過(guò)紅外傳感器和電子指南針?lè)謩e獲得障礙物和角度信息,進(jìn)行處理后控制機(jī)器人的避障和轉(zhuǎn)向,通過(guò)各模塊的協(xié)同工作使機(jī)器人順利完成除塵任務(wù)。在第四屆江蘇省大學(xué)生機(jī)器人大賽除塵比賽中,除塵面積覆蓋率達(dá)到80%以上,并取得一等獎(jiǎng),表明該除塵競(jìng)賽機(jī)器人具有成本低、可靠性高的特點(diǎn),達(dá)到了設(shè)計(jì)要求。
關(guān)鍵詞:MSP430 F5418;紅外傳感器;電子指南針;控制策略;除塵競(jìng)賽機(jī)器人
目前機(jī)器人的發(fā)展已經(jīng)成為衡量各個(gè)國(guó)家科技力量的重要標(biāo)準(zhǔn),歐美、日本等發(fā)達(dá)國(guó)家機(jī)器人設(shè)計(jì)已日趨成熟,種類(lèi)繁多、功能強(qiáng)大。我國(guó)也投入了大量的人、財(cái)力進(jìn)行機(jī)器人的研究和開(kāi)發(fā),非常重視機(jī)器人的教學(xué),把機(jī)器人作為小學(xué)、中學(xué)和大學(xué)的實(shí)訓(xùn)、實(shí)踐課程,大力開(kāi)展國(guó)家、省和市級(jí)各種學(xué)生競(jìng)賽,極大地推進(jìn)了機(jī)器人在我國(guó)的普及,為機(jī)器人的研究打下了堅(jiān)實(shí)的基礎(chǔ)。
競(jìng)賽機(jī)器人的設(shè)計(jì)出現(xiàn)了百花齊放的景象,結(jié)構(gòu)上有人形機(jī)器人、輪式機(jī)器人、足式機(jī)器人和履帶機(jī)器人等;完成任務(wù)上有服務(wù)機(jī)器人、滅火機(jī)器人、除塵機(jī)器人、游景點(diǎn)機(jī)器人等。針對(duì)不同的任務(wù),具有各自的特點(diǎn),除塵競(jìng)賽機(jī)器人的主要性能指標(biāo)是除塵面積的覆蓋率及完成的時(shí)間。本文采用16位微處理器MSP430F5418微控制器,設(shè)計(jì)輪式機(jī)器人,通過(guò)四路直流電機(jī)控制機(jī)器人的避障和運(yùn)動(dòng),完成競(jìng)賽任務(wù)。
1 總體結(jié)構(gòu)
由于除塵競(jìng)賽機(jī)器人完成的任務(wù)較單一,并對(duì)其體積的大小有嚴(yán)格的規(guī)定,所以機(jī)器人的設(shè)計(jì)應(yīng)盡量簡(jiǎn)潔實(shí)用,避免不必要的冗余設(shè)計(jì)。為此,本文采用模塊化方法設(shè)計(jì)除塵競(jìng)賽機(jī)器人,可根據(jù)實(shí)際需要靈活地增加模塊、完善系統(tǒng),完成規(guī)定的任務(wù);系統(tǒng)主要由主控制板、電源管理模塊、紅外測(cè)距模塊、電子指南針及電機(jī)控制板等組成,其系統(tǒng)結(jié)構(gòu)如圖1所示。
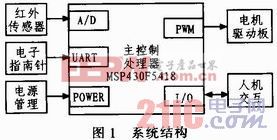
主控制器采用16位微控制器MSP430F5418,因該器件具有較高的運(yùn)算速度、豐富的外圍接口以及低廉的價(jià)格而廣泛地被使用,負(fù)責(zé)對(duì)傳感器采集到的數(shù)據(jù)進(jìn)行處理,根據(jù)獲得的有效信息對(duì)電機(jī)的運(yùn)動(dòng)進(jìn)行控制。電源管理模塊主要負(fù)責(zé)為整個(gè)系統(tǒng)中各個(gè)模塊提供獨(dú)立穩(wěn)定的電源;紅外測(cè)距傳感器負(fù)責(zé)采集環(huán)境的障礙物信息,為機(jī)器人的避障提供依據(jù);電子指南針獲得角度信息來(lái)控制機(jī)器人的轉(zhuǎn)向;電機(jī)驅(qū)動(dòng)板負(fù)責(zé)驅(qū)動(dòng)控制直流電機(jī)。
2 系統(tǒng)實(shí)現(xiàn)
系統(tǒng)主要有主控制板、電源管理模塊、紅外測(cè)距模塊、電子指南針及電機(jī)控制板等組成,紅外測(cè)距和電子指南針模塊是系統(tǒng)實(shí)現(xiàn)的關(guān)鍵。
2.1 紅外測(cè)距傳感器
紅外傳感器主要負(fù)責(zé)測(cè)量機(jī)器人與障礙物之間的距離,為了可靠獲得場(chǎng)地及環(huán)境信息,紅外測(cè)距傳感器的位置部署很關(guān)鍵,7個(gè)傳感器部署的俯視圖側(cè)視圖分別如圖2和圖3所示。
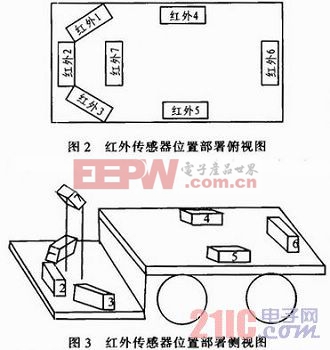
圖2左端為除塵機(jī)器人頭部,機(jī)器人頭部安裝紅外傳感器1、2、3,它們分別呈45°、90°、135°放置,用來(lái)探測(cè)機(jī)器人頭部正前方以及兩側(cè)的障礙物,由于除塵競(jìng)賽機(jī)器人大賽場(chǎng)地的平臺(tái)高度比較低,為了能夠檢測(cè)平臺(tái)的周邊,傳感器1、2、3安裝在較低的位置。機(jī)器人兩側(cè)的紅外傳感器4、5用來(lái)保證機(jī)器人在進(jìn)入房間進(jìn)行轉(zhuǎn)向時(shí)整個(gè)車(chē)身處于寬闊地帶,如果僅靠紅外傳感器1或3,判斷前方的空白區(qū)域可能會(huì)出現(xiàn)機(jī)器人過(guò)早進(jìn)行轉(zhuǎn)向,撞到墻壁的情況。紅外傳感器7傾斜45°安裝,當(dāng)機(jī)器人在平臺(tái)上運(yùn)行時(shí)可以通過(guò)檢測(cè)平臺(tái)邊緣高度的突變來(lái)感知路況。紅外傳感器6用來(lái)獲得機(jī)器人后方的信息作為輔助信息。










評(píng)論