移動機器人視覺定位設計方案

摘要: 針對移動機器人的局部視覺定位問題進行了研究。首先通過移動機器人視覺定位與目標跟蹤系統求出目標質心特征點的位置時間序列, 然后在分析二次成像法獲取目標深度信息的缺陷的基礎上, 提出了一種獲取目標的空間位置和運動信息的方法。該方法利用序列圖像和推廣卡爾曼濾波, 目標獲取采用了H IS 模型。在移動機器人滿足一定機動的條件下, 較精確地得到了目標的空間位置和運動信息。仿真結果驗證了該方法的有效性和可行性。
本文引用地址:http://www.czjhyjcfj.com/article/160389.htm運動視覺研究的是如何從變化場景的一系列不同時刻的圖像中提取出有關場景中的目標的形狀、位置和運動信息, 將之應用于移動機器人的導航與定位。首先要估計出目標的空間位置和運動信息, 從而為移動機器人車體的導航與定位提供關鍵前提。
視覺信息的獲取主要是通過單視覺方式和多視覺方式。單視覺方式結構簡單, 避免了視覺數據融合, 易于實現實時監測。如果利用目標物體的幾何形狀模型, 在目標上取3 個以上的特征點也能夠獲取目標的位置等信息。此方法須保證該組特征點在不同坐標系下的位置關系一致, 而對于一般的雙目視覺系統, 坐標的計算誤差往往會破壞這種關系。
采用在機器人上安裝車載攝像機這種局部視覺定位方式, 本文對移動機器人的運動視覺定位方法進行了研究。該方法的實現分為兩部分: 首先采用移動機器人視覺系統求出目標質心特征點的位置時間序列, 從而將對被跟蹤目標的跟蹤轉化為對其質心的跟蹤; 然后通過推廣卡爾曼濾波方法估計目標的空間位置和運動參數。
1 目標成像的幾何模型
移動機器人視覺系統的坐標關系如圖1 所示。
其中O-X Y Z 為世界坐標系; O c - X cY cZ c 為攝像機坐標系。其中O c 為攝像機的光心, X 軸、Y 軸分別與X c 軸、Y c 軸和圖像的x , y 軸平行, Z c 為攝像機的光軸, 它與圖像平面垂直。光軸與圖像平面的交點O 1 為圖像坐標系的原點。O cO 1 為攝像機的焦距f 。
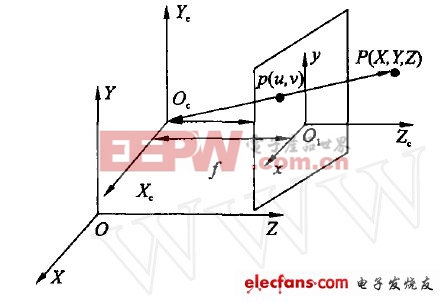
圖1 移動機器人視覺系統的坐標關系
不考慮透鏡畸變, 則由透視投影成像模型為:
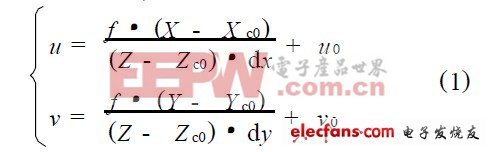
式中, Z′= [u, v ]T 為目標特征點P 在圖像坐標系的二維坐標值; (X , Y , Z ) 為P 點在世界坐標系的坐標; (X c0, Y c0, Z c0) 為攝像機的光心在世界坐標系的坐標; dx , dy 為攝像機的每一個像素分別在x 軸與y 軸方向采樣的量化因子; u0, v 0 分別為攝像機的圖像中心O 1 在x 軸與y 軸方向采樣時的位置偏移量。通過式(1) 即可實現點P 位置在圖像坐標系和世界坐標系的變換。
2 圖像目標識別與定位跟蹤
2.1 目標獲取
目標的獲取即在攝像機采集的圖像中搜索是否有特定目標, 并提取目標區域, 給出目標在圖像中的位置特征點。
由于機器人控制實時性的需要, 過于耗時的復雜算法是不適用的, 因此以顏色信息為目標特征實現目標的獲取。本文采用了HS I 模型, 3 個分量中,I 是受光照影響較大的分量。所以, 在用顏色特征識別目標時, 減少亮度特征I 的權值, 主要以H 和S 作為判定的主要特征, 從而可以提高顏色特征識別的魯棒性。
考慮到連通性, 本文利用捕獲圖像的像素及其八連通區域的平均HS 特征向量與目標像素的HS特征向量差的模是否滿足一定的閾值條件來判別像素的相似性; 同時采用中心連接區域增長法進行區域增長從而確定目標區域。圖2 給出了目標區域分割的算法流程。
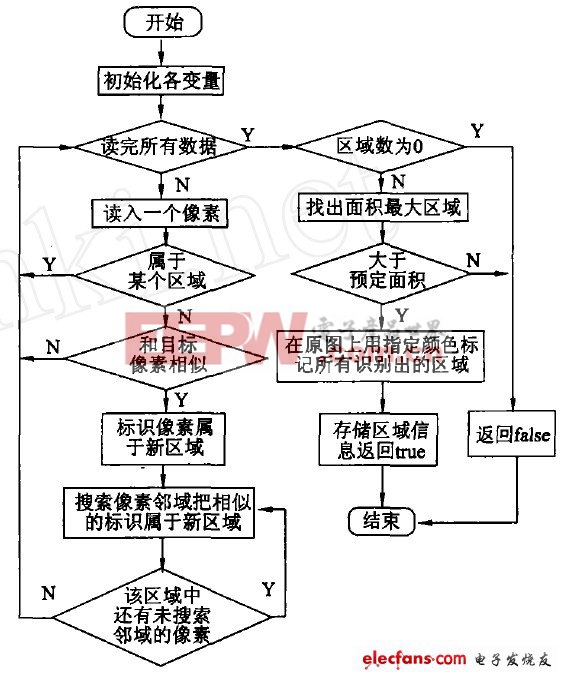
圖2 目標區域分割算法流程
實現目標區域提取后, 由于目標有一定的大小和形狀, 為了對目標定位, 必須在圖像中選取目標上對應的點的圖像位置。由于目標的質心點具有不隨平移、旋轉與比例的改變而變化的特點, 故選取目標的質心點作為目標點。
質心坐標計算公式如下:
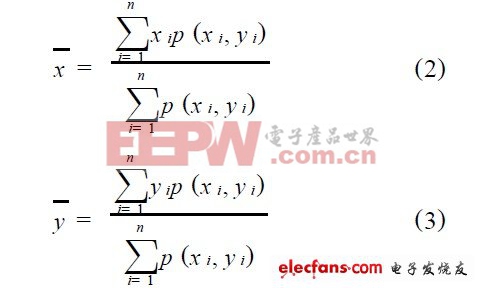
式中:![]() 為質心坐標; n 為目標區域占據的像素個數, 且n≥2; (x i, y i) 為第i 個像素的坐標; p (x i, y i)為第i 個像素的灰度值。
為質心坐標; n 為目標區域占據的像素個數, 且n≥2; (x i, y i) 為第i 個像素的坐標; p (x i, y i)為第i 個像素的灰度值。








評論