基于ATMEGA48單片機的儀表步進電機的細分控制原理及應用

從以上的分析可知,兩相四拍是整步運轉不細分,兩相八拍其實是2細分。合成的磁場和電流矢量夾角以90o和45o的方式變化,如此往復循環。本文引用地址:http://www.czjhyjcfj.com/article/160311.htm
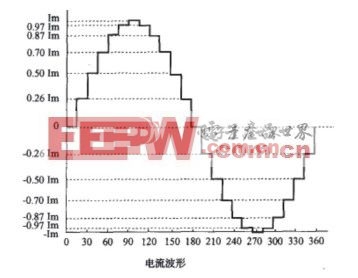
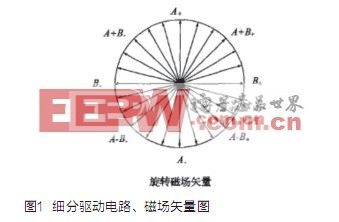
參考相關資料后不難發現:細分驅動技術常用近似正弦波的階梯型電流代替矩形波電流,產生一個微步旋轉磁場,從而帶動電機以更小的步距角轉動,其電流波形和旋轉磁場矢量如圖1所示。同時由于正弦波電流變化平滑,使電機運行更平穩、噪聲更小。即通過改變相鄰兩相(A,B)電流的大小和方向(A相正弦波和B相余弦波矢量疊加),以改變合成磁場的夾角,通過電流矢量合成的方式來控制步進電機運轉。
硬件設計和軟件編程
根據細分原理可知,對于兩相步進電機,需要同時控制兩組線圈的電壓大小和方向才能達到合成電流矢量控制的目的,控制線圈的電流大小有兩種方案:其一是通過單片機寫入數字量,由數模轉換器件輸出模擬電壓,控制線圈電流大小;其二是通過某些單片機自帶的PWM引腳輸出占空比可控的方波,用其交流有效值控制線圈電流大小。很顯然,按照正弦規律變化的占空比決定了線圈電流大小也按照相同的正弦規律變化。線圈的電壓施加方向可以通過邏輯門電路來實現。
綜上,選用具有兩路16位精度PWM功能的ATMEGA48單片機,外圍硬件電路設計如圖2。
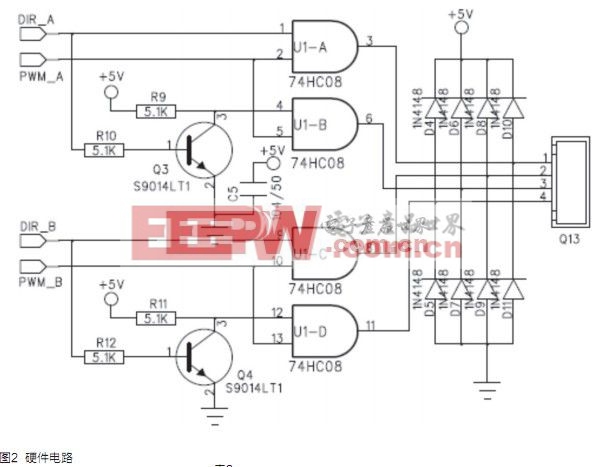
使用該單片機具有PWM功能的PB1和PB2連接PWM_A和PWM_B,使用兩個普通引腳連接DIR_A和DIR_B即可實現對電機的控制。原理說明如下:電機的A、/A、B、/B分別對應四輸入與門電路的3、6、8、11引腳。在DIR_A和DIR_B為低電平時,門電路的1、9引腳為0狀態,三極管Q3、Q4截止,門電路的4、12引腳由于上拉處于1狀態,這樣,與門電路的3、8輸出為0,即A、B為0;此時與門電路的6、11輸出與PWM_A和PWM_B保持一致,即/A、/B由PWM_A和PWM_B決定。在其他狀態下,也具有同類特點:A和/A之間、B和/B之間的通電極性由DIR_A和DIR_B決定;A和/A之間、B和/B之間的電流大小由PWM_A和PWM_B的占空比決定。而且只要三極管Q3、Q4工作正常,與門電路就不會出現邏輯混亂的情況。
配合硬件的設計,軟件上編寫了一個由64個數據組成的數組,分別對應了0~90o正弦波幅度變化的8位數字量化值(以階梯波的方式模擬了64點正弦波抽樣),每個值用來控制輸出波形占空比,實際上參與了電流矢量夾角轉動90o過程中其電流大小的計算。眾所周知,正弦、余弦波相位相差90o,在已知0~90o正弦波幅度變化表后,同樣可以得出90o~180o、180o~270o、270o~360o(0o)的正弦波、余弦波幅度變化表,所以通過0~90o正弦波幅度變化的8位數字量化表的演化,就可以在兩相八拍(二細分)的基礎上把電流矢量夾角分成四個象限,配合極性的控制,在每個象限中把A或/A的正弦波和B或/B的余弦波作8種組合,在每種組合中完成電流大小的變化,最終作到兩相64拍(16細分)的控制。而且,最巧妙的一點就在于:通過選擇64個數據對應每90o范圍的正弦波的64個點,就可以用一個字節的大小來作為區分4個象限的標志,便于對正、余弦的角度進行演化,即0~63對應0~90o,64~127對應90o~180o,128~191對應180o~270o,192~255對應270o~360o。

兩相64拍A、B、/A、/B的驅動狀態表如表3(以B為起始狀態)。
由于儀表指針從當前角指向目標角時,變化量會有不同。為保證指針響應靈敏、無抖動,必須在正、反轉時考慮加、減速控制。程序中,可以根據變化量的大小和正負設定幾個控制區間,分別寫入不同的延時參數,根據此延時參數來控制電流大小、方向(改變PWM_A和PWM_B、DIR_A和DIR_B)變化時間,就達到了加、減速的控制的目的。
結語
通過雙PWM方式控制兩相步進電機,既達到了高精度細分的目的,又在硬件成本上得到了優化。在現有電路的后級增加功率驅動電路并作程序的少量修改,就可以做成高精度、多細分步進電機驅動器。












評論