基于CMOS和紅外傳感器的自動尋路小車的設計

描述:
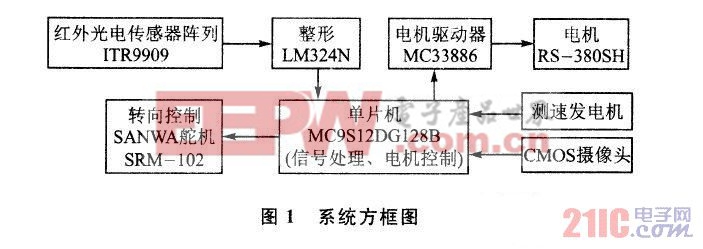
本文引用地址:http://www.czjhyjcfj.com/article/159986.htm我們設計的智能尋徑小車主要由路徑檢測、轉(zhuǎn)向控制、電機驅(qū)動、車速檢測和電擁管理等 功能模塊以及軟件控制算法組成。小車以飛思卡爾公司的16位單片機MC9S12DG128B 為 核心控制器,根據(jù)黑色與白色反射率的不同.采用紅外光電傳感器的陣列對路徑(黑線)進行主 要的識別,再將檢測信號送入單片機,通過比例控制實時修正控制舵機的PWM波占空比,以 實現(xiàn)電動車的平滑轉(zhuǎn)向,使電動車沿黑線自主運動。同時輔以CMOS 攝像頭來預測路徑的變 化,以此來對速度進行分級設定。而對電動車的速度調(diào)節(jié)是以脈沖寬度調(diào)制(PWM)控制方式 來實現(xiàn),其采用數(shù)字閉環(huán)的方式.將測速發(fā)電機的電壓通過A/D 轉(zhuǎn)換后作為反饋信號,以模糊 控制算法對電機的轉(zhuǎn)速進行實時調(diào)節(jié).實現(xiàn)其速度的調(diào)節(jié)。小車的整體設計框圖如圖1所示。
以下為各模塊電路:
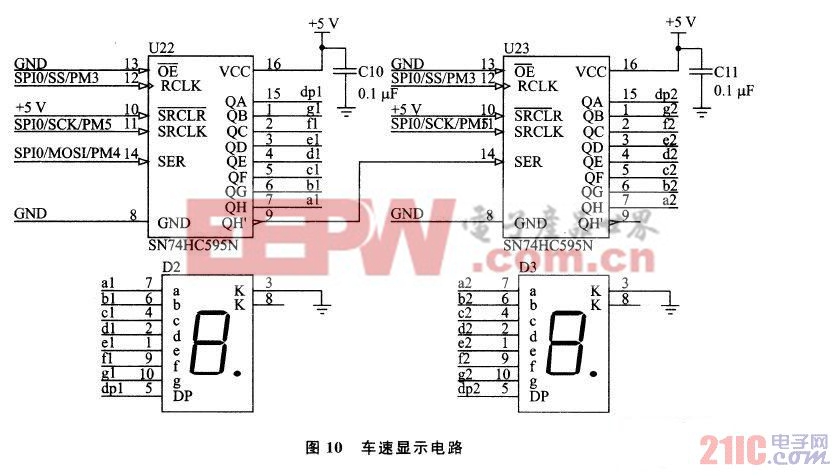
車速顯示電路
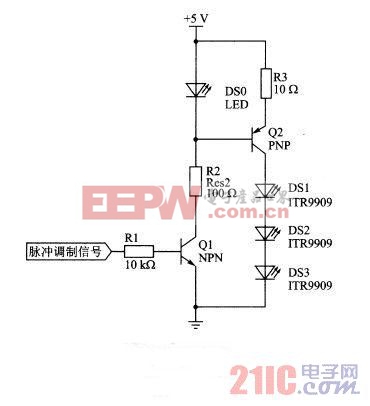
紅外發(fā)射電路












評論