MCX314As型四軸運動控制器工作原理及應用

MCX系列運動控制器是日本NOVA公司設計的專用電路,其中MCX314As是NOVA公司最新的推出的4軸運動控制器,是對MCX314功能的改進和增強。
本文引用地址:http://www.czjhyjcfj.com/article/159971.htmMCX314As以單個電路同時控制4個伺服系統或步進電機系統,可進行各軸獨立的定位控制、速度控制,亦可在任意2軸或3軸中進行圓弧、直線、位模式插補。MCX314As能與8/16位數據總線接口,通過命令、數據和狀態等寄存器實現4軸3聯動的位置、速度、加速度等的運動控制和實時監控、實現圓弧、直線、位模式3種模式的軌跡插補,輸出脈沖頻率達到4MHz,每軸都有伺服反饋輸入端、4個輸入點和8個輸出點,能獨立地設置為恒速、線性、非對稱S曲線加/減控制、非對稱梯形加/減速控制方式,并有2個32位的邏輯、實際位置計數器和狀態比較寄存器,實現位置的閉環控制,另外,較MCX314增加了自動搜尋原位、輸入信號濾波器、同步動作、輸出脈沖32位,圓弧/直線插補脈沖范圍32位、完成S曲線加/減速的非對稱、手動設定模式、位置計算器的可變環形、Z相輸入的實位計數器的清除、實位計算器的增減反轉等功能,同時,MCX314As對連續插補最終寫入、圓弧插補終點指定、輸入UP/DOWN脈沖的計算出錯等作了相應的改善。
2 內部結構和主要功能
圖1為MCX314As的功能框圖。由相同功能的X、Y、Z和U軸的控制部分和插補計數部分組成,主要功能如下:
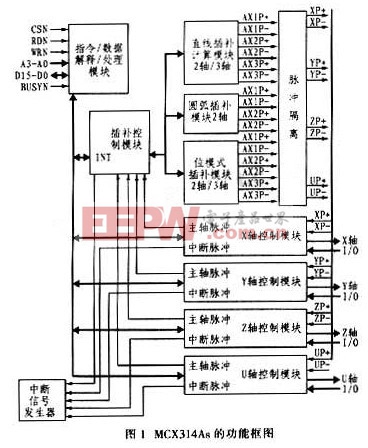
2.1 4軸控制
MCX314As通過脈沖序列驅動控制電機運動,4軸運動控制器中的4個軸都具有相同的功能,允許至多3軸聯動,同時對于恒速驅動、插補或S曲線驅動都有相同的操作方法,S曲線加/減速驅動等4軸的性能相同。
2.2 速度控制
對于恒速驅動、插補或S曲線加/減速驅動,輸出脈沖的頻率范圍是1p/s-4mp/s,而輸出脈沖頻率的精度(時鐘頻率為16MHz)小于±0.1%,速度倍率為1-500,驅動脈沖輸出的速度可以在不運行時自由變化。
2.3 加/減速驅動
MCX314As可以控制每根軸的恒速驅動、插補的加/減速驅動和S曲線加/減速驅動。每個軸還可以被獨立地位置為S曲線或梯形加/減速,使用S曲線的加/減速命令可以使輸出脈沖按拋物線規律進行加/減速。
2.4 插補功能
直線插補:4軸中的任意2軸或3軸都可以實現直線插補運動,運動位置邊界的坐標介于-2147,483 646-+2 147 483
646之間,同時直線插補的位置誤差為±.05LSB(最小插補單位)。
圓弧插補:任意2軸都能實現圓弧插補,其插補坐標的范圍與直線插補相同,圓弧插補的位置誤差為±1.0LSB(最小插補單位)。
位模式插補:這種插補的數據由上位機CPU進行計算,上位機將插補結果寫入MCX314As,然后,MCX314As在預置的驅動速度下連續輸出插補脈沖,根據上位機CPU的處理能力,MCX314As可以對各種形狀的曲線進行插補。
連續插補:MCX314As允許不同的插補方式連續使用,例如直線插補→圓弧插補→直線插補→……,不間斷的連續插補時允許的最大插補速度為2Mp/s。
2.5 位置控制
每個軸都有一個32位的邏輯位置計算器和一個32位的實際位置計算器,邏輯位置計算器記錄輸入的位置脈沖,實際位置計算器記錄從外部編碼器或者線性比例尺輸入的反饋脈沖。
2.6 比較寄存器和軟件限位
每個軸都有2個32位比較寄存器,一個為邏輯位置計數器,另一個為實際位置機計數器。比較結果可從狀態寄存器讀出,也可以通過中斷報出,這些寄存器也可以被用來實現軟件限位。
2.7 自動搜索原位功能
MCX314As在不需要CPU干涉下可以完成自動搜索為原位的工作,這個過程包括高速原位搜索→低速原位搜索→編碼器Z相搜索→補償驅動。這種功能減少了CPU的負擔。
2.8 同步運行
同步運行可實現一些特殊功能,例如在每個軸或2個軸或與該電路相連的外部器件產生的激勵信號能使運行同步開始或停止,可以使用10種類型的激勵信號,其中包括特殊位置、軸運動時的開始/停止和輸入信號的脈沖上升沿/下降沿。4種運行的響應包括軸運動的開始/停止、保存位置的計算值和寫入軸運行的速度等。
2.9 輸入信號過濾
MCX314As具有對每個輸入信號進行濾波的功能,并且可以設置輸入的信號是否進行濾波還是直接進入電路,濾波的時間常數可以選擇。
3 主要控制寄存器及指令系統
3.1 命令寄存器(WR0)
MCX314As中各軸的WR0寄存器用來進行各軸設定和命令寄存,它包括軸設定的各位、命令字設定的各位以復位命令的各位。在向此寄存器寫入軸設定字和命令自后,它將立即執行,某些命令在寫入WR0之前應先寫入WR6和WR7。
3.2 模式寄存器(WR1)
4都有各自的狀態寄存器1,寫哪個寄存器取決于NOP指令的指定或寫前的情況,WR1可以控制輸入信號IN3-IN0的使能,并用于設定減速狀態和比較結果寄存器。
3.3 模式寄存器2(WR2)
WR2設定外部限位開關輸入、反饋計數器脈沖類型及伺服驅動的反饋信號。
3.4 模式寄存器3(WR3)
4個軸都有各自的WR3,讀哪個狀態寄存器取決于已被指定的軸或NOP指令指定的軸。WR3可用于操作手動減速、單獨減速、S曲線加/減速、外部操作模式設定和通用輸出OUT7-OUT4的設定。
3.5 輸出寄存器(WR4)
該寄存器用于設定4軸的輸出信號nOUT3-nOUT0,它也可以被用作16位的通用輸出,若某位置0,將會輸出低電平;置1將會輸出高電平。
3.6 主狀態寄存器(RR0)
該寄存器用來顯示各軸驅動和錯誤的狀態,此外,它還顯示插補、連續插補的就緒信號、圓插補的象限和BP插補的棧計數。
3.7 狀態寄存器(RR1、RR2、RR3)
每個軸都有狀態寄存器RR1、RR2和RR3。讀取哪個狀態寄存器,取決于寫入MCX314As的命令,命令10FH表示X軸,20FX表示Y軸,40FH表示Z軸,80FH表示U軸。
3.8 輸入寄存器(RR4/RR5)
RR4和RR5為通用寄存器,如果寄存器的數據位為0,則輸出為低電平,若數據位為1,則輸出為高電平。
3.9 數據寄存器(RR6/RR7)
RR6和RR7是數據寄存器并對相應的數據讀取命令。RR6存放低16位(D15-D0),RR7存放高16位(D31-D16)。
3.10 寫數據命令
設置驅動參數的如加速度、驅動速度、輸出脈沖數時,要用寫數據命令,以將這些參數/數據寫入MCX314As,如果同時指定多軸,可以對不同的軸同時寫入相同的數據,如果數據長度是2B,只需把數據寫入WR6,如果數據長度大于2B,則高16位寫入WR7,低16位寫入WR6。數據寫入數據寄存器后,向WR0寫入命令設定軸,然后執行命令。
3.11 讀取數據指令
數據讀寫命令用來讀取各軸寄存器的值。當向WR0寫入讀命令后,數據將出現在RR6和RR7中,要讀取的數據是二進制的,負值為二進制補碼形式。
3.12 驅動命令
驅動命令將控制MCX314As以不同的方式輸出驅動脈沖。當向WR0寫入命令代碼并制訂控制軸后,該命令被立即執行。可以同時用同一命令指定多軸,運行時,每個軸的RR0的nDRV位將置為1,當運行結束時,nDRV位置0。
3.13 插補命令
插補命令由2軸或3軸直線插補、順時針/逆時針圓弧插補、2軸或3軸位模式插補和其他有關命令組成,當向WR0寫入插補命令時,置WR0的D8-D1位為0,因為對插補命令沒有必要指定軸。
在執行插補命令之前,必須先執行以下2步:通過設置WR5的D5-D0位來指定要插補的軸;設定主軸的速度參數。












評論