無源自適應控制Buck-Boost變換器研究

摘要:為獲得良好的動、靜態(tài)性能,在Buck-Boost變換器狀態(tài)空間平均模型基礎上,設計了系統(tǒng)無源控制器,它具有系統(tǒng)響應速度快,輸出紋波小的特點,但當輸入電源電壓出現(xiàn)大幅擾動時,穩(wěn)態(tài)輸出存在偏差。針對此問題,提出一種無源自適應控制策略。對采用無源自適應控制策略的Buck-Boost變換器進行仿真,并在輸入電壓寬范圍變化的助航燈光單燈回路上進行了實驗,結果表明該變換器在滿足靜動態(tài)性能指標的同時,對寬輸入電壓擾動具有很強的魯棒性。
關鍵詞:變換器;非線性控制;無源性控制;自適應控制
1 引言
DC/DC開關變換器傳統(tǒng)控制方式多采用PID控制。雖然PID控制的DC/DC變換器結構簡單且易于調節(jié),但該變換器是一個強非線性、時變、離散系統(tǒng),具有非線性和時變不確定性,用常規(guī)的PID控制器很難達到理想的控制效果,因此采用先進的非線性控制策略至關重要。文獻對解決負載擾動和降低系統(tǒng)超調關注比較多,較少考慮輸入電源大幅度變化對DC/DC變換器產(chǎn)生的影響。此處將無源控制方法應用于非線性DC/DC變換器,在Buck-Boost變換器狀態(tài)空間平均模型基礎上,設計了系統(tǒng)無源控制器。針對無源控制在寬輸入電源電壓時穩(wěn)態(tài)存在偏差的問題,提出了無源自適應控制策略。在該控制策略下,Buck-Boost變換器保留了無源控制自身響應速度快、輸出紋波小的優(yōu)點,同時對輸入電源大幅度變化的擾動具有很強的魯棒性。
此處以機場助航燈光單燈監(jiān)控電源的數(shù)字控制DC/DC變換器為例,通過在輸入電源寬范圍(6~30 V)變化的助航燈光單燈監(jiān)控電源中的應用實驗,驗證了無源自適應控制策略的可行性。
2 Buck-Boost變換器的無源化設計
2.1 無源性基本理論
若系統(tǒng)輸入為u(t),輸出為y(t),狀態(tài)變量為x(t),存在連續(xù)可微的半正定的存儲函數(shù)U(x)及正定函數(shù)Q(x)且滿足如下條件:
![]()
那么系統(tǒng)是無源的。如果當u(t)=0,y(t)=0時,有![]() 成立,則該系統(tǒng)為嚴格無源的系統(tǒng),存儲函數(shù)就可成為Lyapunov函數(shù)。則使閉環(huán)系統(tǒng)在原點x=0全局漸近穩(wěn)定的反饋控制器可給定u=φ(y),其中φ(y)為滿足yTφ(y)0的函數(shù)。
成立,則該系統(tǒng)為嚴格無源的系統(tǒng),存儲函數(shù)就可成為Lyapunov函數(shù)。則使閉環(huán)系統(tǒng)在原點x=0全局漸近穩(wěn)定的反饋控制器可給定u=φ(y),其中φ(y)為滿足yTφ(y)0的函數(shù)。
2.2 Buck-Boost變換器無源性
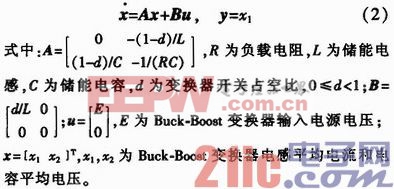
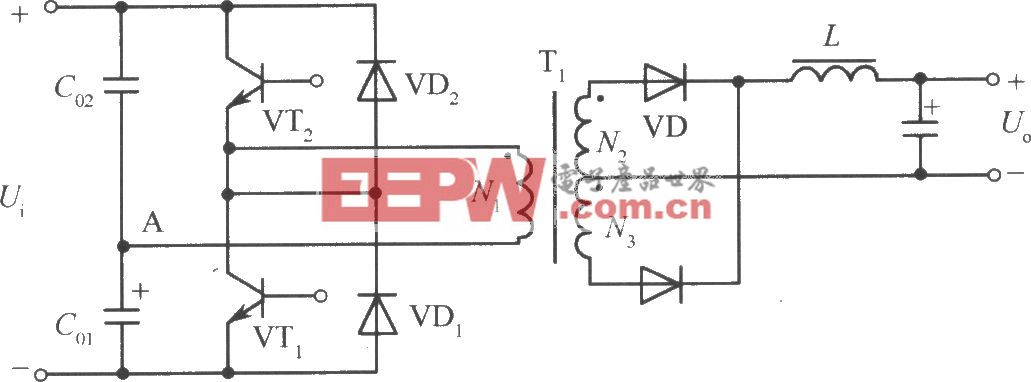
Buck-Boost變換器的主電路如圖1所示,要進行系統(tǒng)無源控制器設計,可使用變換器的Euler-Lagrange數(shù)學模型。換器的Euler-Lagran ge數(shù)學模型與變換器的狀態(tài)平均模型一致,假定變換器工作在連續(xù)狀態(tài),其狀態(tài)空間平均模型為:
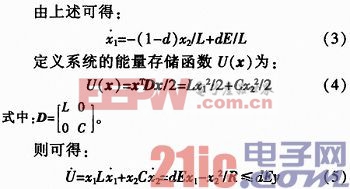
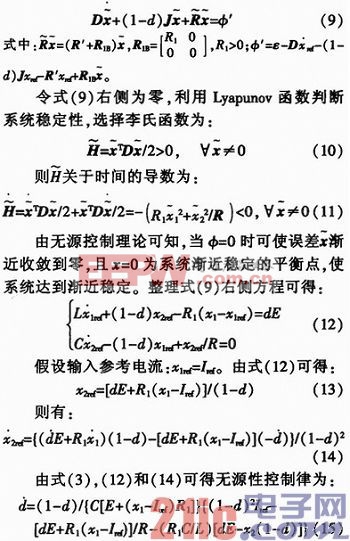
故系統(tǒng)是無源的。可通過函數(shù)φ(y)注入合適的阻尼,使系統(tǒng)輸出誤差漸近穩(wěn)定到零點,系統(tǒng)狀態(tài)及輸出變量逐漸收斂到期望值。

pid控制器相關文章:pid控制器原理
評論