CAN總線+單片機實現通信網絡設計

完全符合ISO11898國際標準的CAN總線物理層專用接口電路有多種,這里僅以CAN總線通用接口電路PCA82C250為例對這類接口芯片作以說明。PCA82C250的引腳圖如圖1所示。各功能引腳如下:
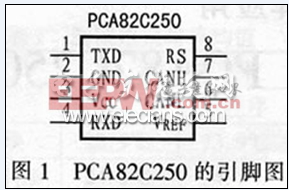
1腳:欲發送數據的輸入端;
2腳:電源地端;
3腳:電源端;
4腳:接收數據的輸出端;
5腳:參考電壓的輸出端;
7腳:高電平CAN總線輸入/輸出端;
8腳:總線脈沖斜率控制電阻連接端。
PCA82C250可以提供對總線數據的差動發送能力和對通信總線數據的差動接收能力。其引腳8較為特殊,該引腳用于選擇電路自身的工作方式;高速、斜率控制和待機。該腳接地時,PCA82C250工作于高速通信方式;接一個一定阻值的電阻器后再接地,用于控制發送數據脈沖的上升和下降斜率(斜率正比于引腳8上的電流值),用以減少射頻干擾;該腳接高電平時,電路進入低電流待機狀態。在這種方式下,發送器被關閉,接收器轉至低電流工作,但接收器仍可對CAN總線上的“顯性”位做出。
如果PCA82C250處于通信總線的網絡終端,在總線上需要加一個120Ω左右的匹配電阻。
4 應用實例
以Atmal AT89C55型單片機為例,AT89C55與RS-485總線接口電路及AT89C55與CAN總線物理層專用接口電路的對比連接圖如圖2所示。
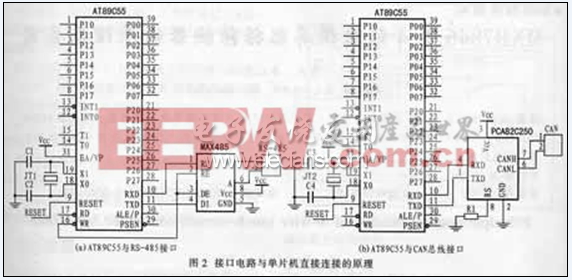
由圖2的對比中可以看出,PCA82C250與AT89C55的硬件連接比MAX485與AT89C55的硬件連接還要簡單,因為,PCA82C250的通信過程無需接收與發送的硬件轉換控制,僅由軟件來控制接浮時,CAN總線表現為“隱性”位數值,即CANH和CANL為懸浮態(VCAHN≈CANL≈VCC/2,相當于關閉總線),這為具有“休眠”功能的系統提供了網絡安全保障;當TXD端輸入為低電平時,CAN總線表現為“顯性”位數值(向總線傳送有效數據位),即CANH輸出高電壓(約3.5V,當VCC為5V時)、CANL輸出低電平(約1.5V,當Vcc為5V時)。顯然,在多主機條件下,“顯性”位和“隱性”位的引入,可在總線上實現非破壞性總線仲裁,以裁決哪一個主設備應是下一個占有總線的設備。由于沒有用到PCA82C250參考電壓的輸出值,因此,PCA82C250的5腳可懸空,而8腳所接的電阻RS用于控制CAN總線的輸出脈沖的上升、下降沿的斜率,以降低總線的射頻干擾。當RS上的電阻大于0.75CC時,PCA82C250芯片進入低功耗待機狀態;當RS上的電壓小于0.3Vcc時,PCA82C250進入高速通信狀態;當RS上的電壓處于0.4Vcc至0.6Vcc之間時,PCA82C250進入CAN總線輸出脈沖上升、下降沿的斜率控制通信狀態,其斜率大小與RS上的電壓成正比。
圖2中,二個通信系統的軟件幾乎相同。當采用PCA82C250的作為總線接口替代原有的MAX485時,在軟件上所做的變更有:首先,可取消RS-485總線的通信方向控制指令部分,因為CA7402097N總線接口已不需要此功能;其次,RS-485總線在總線發送時,由于發送、接收控制端已連接在一起,即自動關閉了總線數據接收功能,而CAN總線接口在總線數據發送的同時也在進行總線數據的接收(CAN總線接口不提供通信接收、發送數據的分離控制功能),因此,在軟件設計上對此應有所考慮。當然,這為多機通信系統中的總線數據沖突的軟件識別與仲裁提供了條件。
當需要MCU與通信網絡之間的電氣隔離時,可在MCU與CAN總線的物理層專用接口電路之間增加2個光電隔離器件(如6N137光電隔離電路),即可實現MCU與通信網絡之間的電氣隔離。
5 結論
軟件上僅做少許修改,甚至不修改原有的RS-485總線的通信軟件就能適應新的系統工作。必要時通過修改原有的RS-485總線的通信軟件即可實現多主式多機數據通信,充分利用了CAN總線物理層的優勢。在硬件方面,能夠以簡單的形式、較低的價格、較高的性能構造出極具競爭力的分布式測控系統,使多機互連的分布式測控系統的通信網絡性能得以提升。











評論