基于Modbus RTU通信協議的伺服電機聯動控制系統

例如:AD3~AD0分別對應1~15點定位數據,輸出端子分別選用PA3-9~PA3-12,設定值分別為60~63,
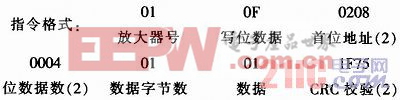
2.2.2 參數編輯
通過參數編輯,改變定位數據編號,最終改變運行狀態和運行結束停止位置。參數編輯信息見表2。
例如:定位數據編號選擇01,此時AD3~AD0分別為0001
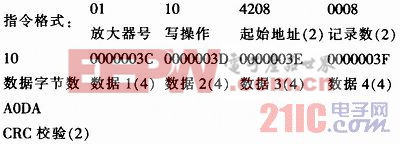
2.2.3 定位數據編輯
通過定位數據編輯,可以設置一組定位數據,包括相對位置/絕對位置,定位結束停止位置,運行速度(轉速),加/減速時間和M代碼等。其中相對位置以上次運行結束坐標為參考系;絕對位置以原點為參考系。定位結束停止位置表示定位結束時候停止的位置,是數字量。運行速度表示運行過程中的轉速,單位是轉/分。加/減速時間表示從上次運行速度更新到設定速度變化所需要的時間,單位是0.1 ms。通過查詢M代碼可以查詢伺服系統運行的定位數據編號,設置值為00~FF。
例如:定位數據1:(絕對位置(ABS),停止位置100000,轉速120轉/分,加減速時間都是0.1 ms,不輸出M代碼)

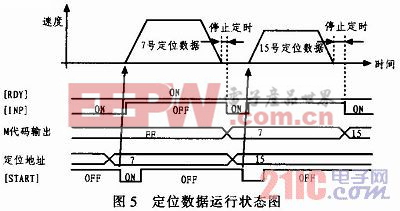
2.3 運行狀態圖
按照來自Modbus通信的指令,進行定位運行。定位結束[INP]ON時,設定要運行的定位數據編號,若將自動起動[START]ON(起動)則執行相應定位數據編號的定位,具體運行狀態圖如圖5所示。由此可見,START信號是上升沿有效信號。本文引用地址:http://www.czjhyjcfj.com/article/154747.htm
2.4 連續運行實現
系統可以設置1~15號定位數據持續運行,每次運行先要設定運行的定位數據編號,然后將自動起動[START]1 ON(起動)。但是,運行到最后一個定位數據編號結束之后,系統就會自動停止運動。
根據運行狀態圖,可以設置其他編號定位數據運行后不輸出M代碼。當最后一個定位數據運行完成后輸出一個M代碼。實時查詢M代碼,如果查詢到設定的M代碼,表明系統設定最后一個定位數據編號已經執行完成,然后立即通過軟件開啟START。由于[START]信號是上升沿有效信號,因此,每次將[START]ON之后,要置于OFF,方便下一次ON時有上升沿。

伺服電機相關文章:伺服電機工作原理








評論