基于Modbus RTU通信協議的伺服電機聯動控制系統

2 Modbus RTU協議及實現
2.1 Modbus協議
Modbus是OSI模型第7層上的應用層報文傳輸協議,它在連接至不同類型總線或網絡的設備之間提供客戶機/服務器通信。標準的Modbus口是使用RS-232C兼容串行接口,它定義了連接口的針腳、電纜、信號位、傳輸波特率、奇偶校驗。控制器能直接或經由Modem組網。控制器通信使用主-從技術,即僅一設備(主設備)能初始化傳輸(查詢)。其它設備(從設備)根據主設備查詢提供的數據做出相應反應。典型的主設備:主機和可編程儀表。典型的從設備:可編程控制器。本系統中主設備指上位機,從設備主要指伺服放大器。
上位機可單獨和伺服放大器通信,也能以廣播方式和所有放大器通信。如果單獨通信,伺服放大器返回一消息作為回應,如果是以廣播方式查詢的,則不作任何回應。Modbus協議建立了上位機查詢的格式:設備(或廣播)地址、功能代碼、所有要發送的數據、一錯誤檢測域。伺服放大器回應消息也由Modbus協議構成,包括確認要行動的域、任何要返回的數據和一錯誤檢測域。如果在消息接收過程中發生一錯誤,或不能執行其命令,伺服放大器將建立一錯誤消息并把它作為回應發送出去。
通信過程主要分查詢和響應。查詢指從上位機通過功能代碼告之被選中的伺服放大器要執行的何種功能;響應指伺服放大器對查詢信息功能代碼的回應。通信是由來自上位機的查詢開始的。伺服放大器之間不能進行查詢。
控制器能設置為兩種傳輸模式(ASCII或RTU)之中的任意一種標準進行通信。文中選用RTU(遠程終端設備)模式,還包括設置其他串口通信參數(波特率,校驗方式等)。需要注意的是,在同一個Modbus網絡上所有的設備都必須有相同的傳輸模式和串口參數。RTU模式下,數據幀格式是:地址+功能代碼+信息+CRC-16校驗。CRC校驗的全稱是循環冗余校驗,其特點是:檢錯能力極強,花費CPU開銷小。
2.2 參數編輯
2.2.1 參數綁定
設計中伺服電機采用定位數據運行,默認最多15點定位數據,AD3~AD0分別對應1~15點定位數據,具體數據見表1。本文引用地址:http://www.czjhyjcfj.com/article/154747.htm
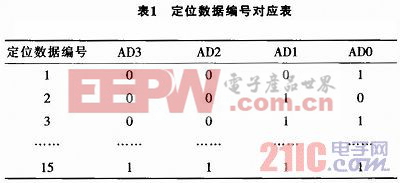
在伺服放大器上通過參數綁定,一一對應到伺服放大器輸出端子,然后通過調整輸出端子的邏輯值(0或者1),進而改變AD3~AD0的數值,最后決定選取的定位數據編號。其中部分參數綁定信息見表2。


伺服電機相關文章:伺服電機工作原理








評論