TMS320LF2407A實現教育機器人硬件平臺

引言
本文引用地址:http://www.czjhyjcfj.com/article/150171.htm 智能機器人作為一個高新科技的綜合體,直接反應了一個國家信息技術的發展水平,受到了社會各界的高度重視。智能機器人涉及了信息技術的幾乎所用內容,可以讓學生接觸并看到信息技術的全景,并且智能機器人是信息技術的開放平臺,學生可以充分發揮想象力去開發各種智能裝置,從而培養學生對信息技術的開發能力,在開發過程中,培養各種能力,激發學生的興趣。
本文設計的以智能小車為載體的基于TMS320LF2407A教育機器人硬件平臺,包括電源模塊和電機驅動模塊電路設計,并集成了紅外和光敏傳感器和無線數據傳輸模塊,通過軟件設計可實現尋跡、避障及尋跡避障相結合的功能,達到了理論課程學習與動手實踐相結合的目的,鞏固了知識并進一步提高了學習者的興趣。
1 設計思想與總體方案
1.1 教育機器人的設計思想
本教育機器人以TMS320LF2407A微控制器為核心,由紅外傳感器和光電傳感器等各種傳感器采集的外部環境信息作為輸入信號,通過DSP進行運算處理,利用PWM技術實時輸出調整小車的速度和方向,實現小車尋跡、避障、尋跡加避障等自動控制的功能,另外在小車于尋跡過
程中遇到障礙物,當尋跡加避障算法在尋跡的同時不能完成避障功能時,可由PC機與其相連的無線通信收發模塊和DSP相連的另一無線收發模塊實現無線短距離通信,控制小車脫離障礙區并進行正常尋跡。
1.2 總體設計方案和框圖
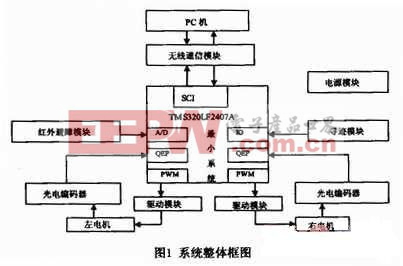
機器人小車系統整體框圖如圖1所示,主要有TMS320LF2407A最小系統部分、電源模塊、電機驅動模塊、傳感器模塊、無線通信模塊構成,實現由車載的各種傳感器將信息不斷地傳遞給車載微控制器,并將編程設計算法下載至微控制器實現實時調整小車的運動狀態,完成一定的功能要求。
2 系統硬件模塊設計
2.1 TMS320LF2407A最小系統設計
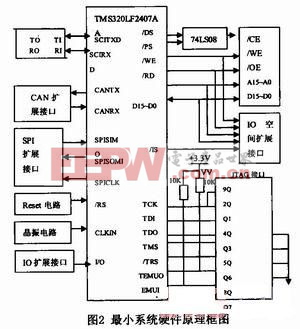
TMS320LF2407A是2000系列中目前應用最為廣泛的產品,它在片上不僅具有一個適于進行數字信號處理的高效處理器,而且還集成了存儲器和適應控制領域應用的豐富片上外設,從而構成了一個基本的片上計算機系統。除了具有改進的哈佛結構、多總線結構和流水線結構等優點外,它還采用高性能靜態 CMOS技術,電壓降為3.3V,減少了功耗,指令執行速度提高到40MIPS,幾乎所有指令都可以在2 5ns的單周期內完成。TMS320LF2407A的基本結構包括中央處理器單元(CPU)、存儲器、片內外設與專用硬件電路三個組成部分。本系統硬件平臺充分利用TMS320LF2407A控制器的特點采用模塊化設計,分為基本電路和擴展控制電路部分。基本電路包括電源電路、復位電路、時鐘電路、A/D 輸入通道和JTAG仿真電路等。擴展電路包括存儲器及譯碼電路、串行通信SCI與RS-232接口電路、CAN接口電路、SPI功能模塊等。系統硬件原理框圖如圖2所示。








評論