嵌入式組合控制直線一級(jí)倒立擺系統(tǒng)

2 嵌入式組合控制器的設(shè)計(jì)
2.1 系統(tǒng)能控性分析
被控系統(tǒng)狀態(tài)完全可控性矩陣Uc=[B AB A2BA3B],通過計(jì)算可得rank(Uc)=4,即矩陣Uc的秩等于系統(tǒng)狀態(tài)變量維數(shù);被控系統(tǒng)輸出完全可控性矩陣Uo=[CB CAB CA2B CA3B D],求得rank(Uo),即矩陣Uo的秩等于系統(tǒng)輸出向量維數(shù)。所以系統(tǒng)可控,可以對(duì)系統(tǒng)進(jìn)行控制器設(shè)計(jì),使系統(tǒng)穩(wěn)定。
本文所使用的控制器是由自動(dòng)起擺控制器Swingup Controller、線性二次調(diào)節(jié)器LQR Controller和學(xué)生設(shè)計(jì)的控制器Controller1組成的嵌入式組合控制器。在Simulink中搭建直線一級(jí)倒立擺嵌入式組合控制系統(tǒng),如圖2所示。本文引用地址:http://www.czjhyjcfj.com/article/149185.htm
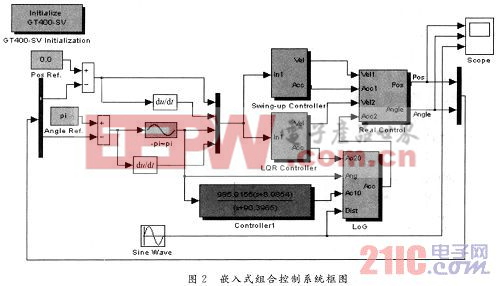
自動(dòng)起擺控制器Swing-up Controller能夠控制直線一級(jí)倒立擺由靜止下垂的穩(wěn)定平衡狀態(tài)自動(dòng)轉(zhuǎn)化到豎直向上的不穩(wěn)定平衡狀態(tài),而無(wú)需給擺桿施加力的作用,就可以實(shí)現(xiàn)擺桿的自動(dòng)擺起。
2.2 LQR控制器原理
針對(duì)線性系統(tǒng)的狀態(tài)方程![]() 和輸出方程y(t)=Cx(t)+Du(t),LQR方法通過確定最佳控制量u(t)=-Kx(t)中的矩陣K,使得控制性能指標(biāo)
和輸出方程y(t)=Cx(t)+Du(t),LQR方法通過確定最佳控制量u(t)=-Kx(t)中的矩陣K,使得控制性能指標(biāo)![]() 取極小值。其中,x是狀態(tài)向量;u是控制向量;R為正定厄米特或?qū)崒?duì)稱矩陣;Q為正定或半正定厄米特或?qū)崒?duì)稱矩陣。參數(shù)R和Q分別用來平衡輸入量和狀態(tài)量的權(quán)重。
取極小值。其中,x是狀態(tài)向量;u是控制向量;R為正定厄米特或?qū)崒?duì)稱矩陣;Q為正定或半正定厄米特或?qū)崒?duì)稱矩陣。參數(shù)R和Q分別用來平衡輸入量和狀態(tài)量的權(quán)重。
2.3 系統(tǒng)的結(jié)構(gòu)
系統(tǒng)主要由被控對(duì)象、起擺控制器、LQR控制器、學(xué)生控制器、位置給定器、角度給定器、運(yùn)算器和擾動(dòng)信號(hào)發(fā)生器等構(gòu)成。整個(gè)系統(tǒng)是在固高公司提供的直線單級(jí)倒立擺控制系統(tǒng)基礎(chǔ)上,設(shè)計(jì)邏輯切換單元(LOG),把學(xué)生控制器嵌入系統(tǒng)中,形成嵌入式組合控制的倒立擺控制系統(tǒng)。








評(píng)論