基于ARM嵌入式圖像處理平臺的太陽跟蹤系統

摘要:基于計算機視覺原理,以ARM微控制器為核心構建嵌入式圖像處理平臺,實現了對太陽的實時跟蹤。系統采用CMOS圖像傳感器采集太陽圖像,通過微控制器計算太陽角度,通過串口控制轉臺,實現對太陽的高精度跟蹤。同時,與視日運動規律相結合,保證系統的可靠性。試驗表明,該系統在降低系統能耗的同時,能可靠有效地跟蹤太陽運動。
關鍵詞:太陽跟蹤;ARM微控制器;計算機視覺;CMOS圖像傳感器
0 引言
隨著社會的發展和進步,環保節能已經成為人類可持續發展的必要條件。目前,再生能源的開發和利用越來越受到人們的關注。太陽能由于其普遍、無害、無限、長久等特點,成為最綠色、最理想、最可靠的替代能源。但太陽能同時存在分散,不穩定,效率低等特點,太陽能光伏系統為解決這一問題提供了條件。
就目前的太陽能光伏系統而言,如何最大限度提高太陽能的轉換率,仍是國內外的研究熱點。有研究表明,和始終朝南的固定表面相比,與太陽輻射方向始終保持垂直的表面對太陽能的利用率提高約33%。太陽跟蹤裝置可以保證太陽輻射方向始終垂直于太陽能電池板平面,使接收到的太陽輻射大大增加,提高了太陽能的接受率與利用率,因而得到廣泛的應用。
太陽跟蹤裝置的分類方法有很多,按照跟蹤方法,主要可分為視日運動跟蹤和光電跟蹤,視日運動跟蹤又可分為單軸跟蹤和雙軸跟蹤。光電跟蹤裝置有較高靈敏度,結構簡單,能通過反饋消除累積誤差,具有較大優勢,但受環境影響很大。其關鍵部件是光電傳感器,常用的是光敏電阻。由于光敏電阻安裝位置不連續和環境光散射等因素的影響,系統不能連續跟蹤太陽,精度有限。視日運動跟蹤能夠全天候實時跟蹤,但是存在累積誤差。其中,單軸跟蹤裝置結構簡單,但跟蹤誤差大;雙軸跟蹤裝置算法復雜,跟蹤難度較大,但跟蹤精度較高。
本文用基于32位ARM嵌入式微控制器S3C2440來構建太陽跟蹤系統,采用CMOS圖像傳感器來感知太陽方位,并通過微控制器計算獲取太陽跟蹤誤差,實現對太陽的高精度跟蹤。加入視日運動規律,在跟蹤目標丟失時,對系統進行重新定位。同時,該系統的結構簡單輕便,功耗低,環境適應能力強,能應用于各種太陽能設備。
1 硬件設計
1.1 系統硬件結構
系統以ARM微控制器作為主控制器,采用CMOS圖像傳感器采集圖像,并利用雙軸轉臺來支撐太陽能電池板。其中雙軸轉臺集成了電機驅動與控制部分,通過串口與主控制器進行通信。
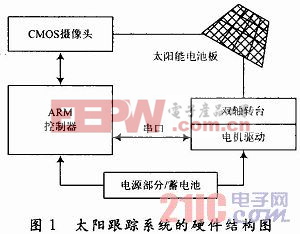
如圖1所示是太陽跟蹤系統的硬件結構圖。在圖1中,CMOS圖像傳感器與太陽能電池板處在同一平面,并固連在雙軸轉臺上;ARM處理器與雙軸轉臺的電機驅動部分采用串口通信方式;系統的供電均由蓄電池支持(包括ARM控制板和轉臺),因而形成了一個獨立系統。系統的基本工作原理是:根據視日運動規律或CMOS圖像傳感器采集的天空圖像,利用ARM處理器求取系統跟蹤控制參數,并通過串口來控制雙軸轉臺的轉動。
1.2 硬件介紹
(1)ARM微控制器。從實用角度考慮,太陽跟蹤系統的低功耗設計顯得尤為重要,ARM微處理器在保證高性能的前提下能夠盡量降低功耗。相對于PC機,ARM微處理器占用空間較小,質量輕,可靠性強,硬件資源豐富,在簡化系統結構的同時為系統功能擴展提供了可能。系統選用32位ARM嵌入式微控制器S3C2440來構建控制平臺。運用ARM微控制器構建的嵌入式圖像處理平臺大大提高了圖像的處理速度,同時有效降低了系統成本。圖像處理系統還具有拆裝方便,配置靈活等優點,安全性得到大大提高。
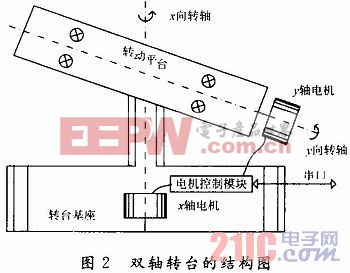
(2)雙軸轉臺。系統采用集成式雙軸轉臺,其結構如圖2所示,工作電壓為24 V,可利用蓄電池供電。在圖2中,x向為水平方向,y向為垂直方向。x向轉角對應太陽方位角,y向轉角對應太陽高度角。該雙軸轉臺x向轉動范圍為-157°~+157°,y向轉動范圍為0°~90°,集成了電機控制模塊,并提供串行接口,控制器可以利用串口通信來控制并驅動轉臺在x向和y向上的轉動。
(3)CMOS圖像傳感器。圖像傳感器產品主要有CCD,CMOS,CIS三種。其中CMOS圖像傳感器集成度高,價格低廉,而且可以實現數字化輸出,軟件可編程控制,提高了系統設計的靈活性,同時也具有較高的抗干擾性和穩定性。系統采用的圖像傳感器為OmniVision公司的OV 9650型COMS攝像頭,其功耗為30μW,陣列大小為1 300×1 028 pixels,焦距為4.85 mm,像素大小為3.18μm×3.18μm,支持軟件可編程控制,輸出圖像格式包括YUV,RGB等。








評論